روش های اندازه گیری گشتاور (2)
در این مقاله شما با ساختار مکانیکی و الکتریکی انواع مبدل های گشتاور چرخان و غیر چرخان آشنا خواهید شد
روش های اندازه گیری گشتاور (2)
در این مقاله شما با ساختار مکانیکی و الکتریکی انواع مبدل های گشتاور چرخان و غیر چرخان آشنا خواهید شد
بخش زیر ساختار مبدلهای گشتاور را توضیح میدهد که در آن بدنه اندازهگیری بخش چرخان مبدل را تشکیل میدهد این بخش توسط گشتاوری که قرار است اندازهگیری شود، تغییر شکل الاستیکی پیدا میکند، یا کرنش های مکانیکی روی سطح آن ایجاد می شود. کرنشی که در این شرایط رخ می دهد توسط کرنش سنج ها اندازه گیری می شود.
مبدل گشتاور از این نوع اصولا از یک بدنه اندازه گیری چرخان به نام روتور و یک محفظه به نام استاتور تشکیل شده است. مبدل های گشتاور می توانند از نظر ساختاری نه تنها در شکل انتقال سیگنال، بلکه در طراحی مکانیکی نیز متفاوت باشند.
برای انتقال ولتاژ تغذیه و سیگنال اندازه گیری می توان از حلقه های لغزشی یا سیستم های بدون تماس استفاده کرد. علاوه بر این، برخی از انواع شفت های گشتاور دارای یاتاقان های داخلی هستند و برخی دیگر بدون یاتاقان هستند. طراحی بدنه اندازه گیری مبدل های گشتاور مهم است.
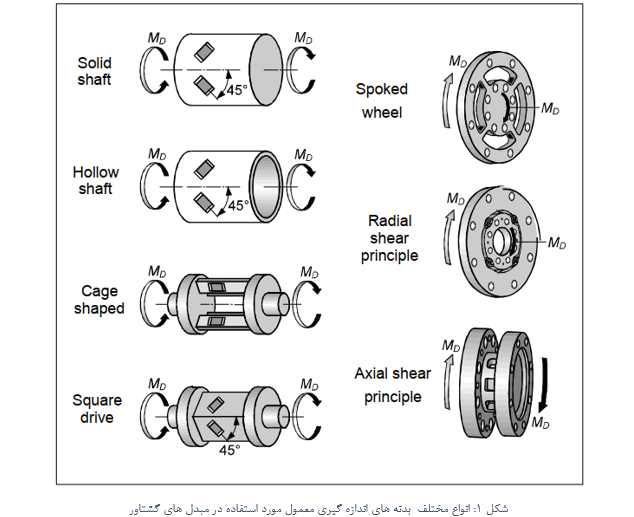
به عنوان یک اصل اساسی، اجسام اندازه گیری می توانند هر شکلی داشته باشند. اما از طرف دیگر آنها باید سطوح صافی داشته باشند که کرنش ایجاد شده توسط گشتاور را بتوان با استفاده از کرنش سنج ها اندازه گیری کرد. بدنههای اندازهگیری پرکاربرد شامل محورهای توپر، توخالی یا مربعی هستند. هنگامی که از این طرح ها استفاده می شود، گشتاور در آنها تنها تنش پیچشی ایجاد می کند.
در مقابل، بدنههای اندازهگیری لولهای با سطح مقطع یکسان، سفتی خمشی بالاتری را ارائه می دهند. شفت های مربعی شکل توپر اغلب برای محدوده های اندازه گیری گشتاورهای بالا استفاده می شود. ساختار آن بسیار ساده بوده و نصب استرین گیج روی آن آسان است.
در مورد سایر اشکال بدنه اندازهگیری، مانند پرهها یا قفسها، گشتاور اعمالشده یک تنش خمشی موضعی در عناصر فرعی بدنه اندازهگیری ایجاد میکند. به خصوص برای مقادیر گشتاورهای کم، بدنه های اندازه گیری متقاطع، مزیت ایجاد کرنش بالاتر همراه با سفتی خمشی بیشتر را ارائه می دهند.
نیازهای امروزی مبدلهای گشتاور برای میزهای تست قدرت به قدری بالا و متنوع است است که با نسخههای بدنه اندازهگیری ذکر شده در بالا نمیتوان آنها را به طور مطلوب برآورده کرد. به همین دلیل است که در اواسط دهه 1990 HBM اولین تولید کننده مبدل های گشتاور بود که اصل برشی را برای اندازه گیری گشتاور معرفی کرد. شکل 1 یک نمای کلی از بدنه های اندازه گیری را نشان می دهد که بیشتر در حال حاضر استفاده می شوند.
انتخاب دقیق هندسه برای محل نصب استرین گیج ها و بقیه المان ها، مشخصه های مورد انتظار از فلنج گشتاور را در حاشیههای وسیع ممکن میسازد. شکل 2 یک نمونه از این بدنه های اندازه گیری را نشان می دهد.

بسته به مبدل گشتاور مربوطه، یکی از سه حالت های زیر برای انتقال نیروی گشتاور به مبدل، استفاده می شود
معمولا شرکت های سازنده، کوپلینگ هایی را برای مبدل های گشتاور مختلف ارائه می دهند که در رابطه با موارد فوق تست شده و حتی در صورت لزوم روی مبدل ها نصب می شوند. برای تسهیل اتصال و انتقال گشتاور توسط مشتری، این کوپلینگ ها در اشکال مختلف طراحی می شوند و برای به حداقل رساندن نیروهای جانبی و همچنین گشتاورهای خمشی بر روی مبدل ، مورد استفاده قرار می گیرند.
در نتیجهی نصب مبدل های گشتاور با کوپلینگ، کیفیت تعادل و بالانس ممکن است تغییر کند. در سرعت های عملیاتی بالا ممکن است مشکلاتی ایجاد شود. در صورت امکان، سیستم باید در حالت آماده به کار بالانس شود. اطلاعات بیشتر در مورد نحوه انتقال گشتاور توسط اتصالات مطرح شده در بالا را می توانید در بخش های بعدی بیابید. این موارد به صورت مفصل در فصل های بعدی توضیح داده خواهد شد.
در مورد شفت های گشتاور با یاتاقان، استاتور به صورت شعاعی و محوری توسط یاتاقان ها نسبت به بدنه اندازه گیری دوار ثابت می شود. این مدل زمانی استفاده می شود که:
حالت دوم اساسا در مورد شفت های گشتاور با حلقه های لغزش صدق می کند. با نصب و اتصالات صحیح، گشتاوری که قرار است اندازه گیری شود، در سمت مبدل، تاثیر اصطکاک غلتک بلبرینگ بر نتیجه اندازه گیری بسیار کم است.
در مبدلهای گشتاور برای سرعتهای کاری بالا، استاتور به طور مکانیکی به بدنه اندازهگیری در حال چرخش متصل نیست. بدنه اندازه گیری مابین شفت ها نصب می شود و استاتور روی دستگاه نصب می شود. از آنجایی که این آرایش شامل هیچ بخش سایشی نیست، بنابراین این مبدل ها به جز قسمت های نوری آنها که سرعت شفت را اندازه گیری می کنند، به تعمیر چندانی نیاز ندارند و طول عمر آنها بسیار طولانی می باشد.
در مبدل های گشتاور، سیگنال اندازه گیری در درجه اول روی روتور تولید می شود. مدارات استرین گیج و بقیه المان های مربوطه، قطعات غیرفعال یا همان پسیو هستند و بنابراین این قطعات برای عملکرد صحیحشان نیاز به ولتاژ تغذیه دارند. سیگنال خروجی مربوط به کمیت اندازه گیری شده معمولا در حد چند میلی ولت است. دو راه ممکن برای انتقال سیگنال های اندازه گیری و ولتاژ تغذیه بین روتور و استاتور وجود دارد. این دو روش عبارتند از:
مبدل های گشتاور شرکت هوشمند صنعت تاو الکترونیک از هر دو نوع این روش ها استفاده می کنند. شفتهای گشتاور با حلقههای لغزش عمدتا برای اندازهگیری های کوتاهمدت با سرعتهای چرخشی کمتر از 4000 دور در دقیقه مناسب هستند. عیب این مبدل ها ساییدگی اجتناب ناپذیری است که در حلقه های لغزنده رخ می دهد و در نتیجه نیاز به نگهداری و تعمیر دارند.
در مقابل، سیستم های انتقال بدون تماس در مبدل های گشتاور، برای عملکرد طولانی مدت در سرعت های چرخش بالا طراحی و گنجانده شده است. این نوع مبدل ها دارای قطعات الکترونیکی ویژهای برای انتقال ولتاژ تغذیه و سیگنال اندازه گیری می باشند.
منبع تغذیه و سیگنال اندازه گیری ولتاژ در شفت های اندازه گیری گشتاور از روی حلقه های لغزنده نقره ای سخت و برس های کربن گرافیت نقره ای منتقل می شوند. این ترکیب باعث انتقال بهینه سیگنال، بدون تداخل (نویز کم، ولتاژهای حرارتی کم)، عمر طولانی ( 3*108 تا 6*108 دور) را ارائه می دهد.
دو مجموعه برس به منظور تضمین تماس قابل اعتماد در تمام شرایط عملیاتی استفاده می شود. این دو مجموعه به گونه ای چیده شده اند که دو برس با فشار فنر در مقابل هر حلقه لغزشی نگه داشته می شوند، اما در یک زاویه معین می توانند جابجا می شوند.
روش های اندازه گیری گشتاور (1)
اندازهگیری دقیق گشتاور، بهویژه در ماشین های چرخان، تقاضاهای سنگینی را از طرف تولیدکنندگان و میزهای آزمایش ایجاد میکند، در اینجا شما با نحوه اندازه گیری گشتاور آشنا می شوید
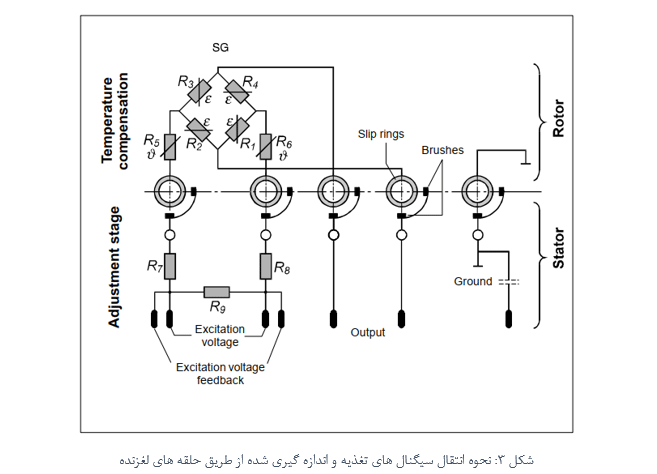
شکل 3 پیکربندی یک پل اندازه گیری استرین گیجی را به همراه اجزای جبران کننده و انتقال سیگنال اندازه گیری از طریق حلقه های لغزش نشان می دهد. اگرچه چهار حلقه لغزش در واقع برای انتقال سیگنال کافی است، اما شفتهای گشتاور معمولا با یک حلقه لغزش اضافی برای برابر کردن پتانسیل بین روتور و استاتور بهره می برند. یکسان سازی کامل معمولا از طریق یاتاقان ها تضمین نمی شود. بدون این یکسان سازی پتانسیل تداخل سیگنال قابل توجهی می تواند ناشی از تفاوت در پتانسیل های رتور و استاتور ایجاد شود.
ساختار داخلی این مبدل ها در دو نوع زیر می باشد:
1- استفاده از سیگنال AC برای تغذیه مدارات داخلی، و مسیرهای جداگانه برای ارسال سیگنال تغذیه و دریافت سیگنال اندازه گیری شده
2- استفاده از سیگنال DC برای تغذیه مدارات داخلی و مسیرهای مشترک برای ارسال توان الکتریکی و دریافت سیگنال های اندازه گیری شده
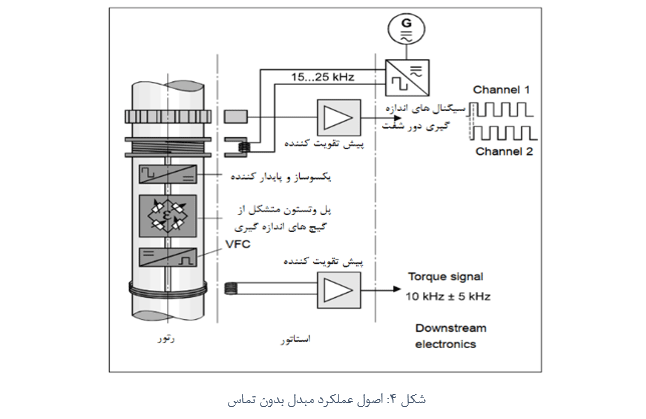
وقتی یک مبدل گشتاور از طریق ولتاژ AC تغذیه می شود، بستگی به تقویت کننده مورد استفاده در آن، یک سیگنال با فرکانس 15 الی 25 کیلوهرتز از استاتور به رتور مبدل انتقال داده می شود(شکل 4).
یکسوسازها و مدارات پایدار کننده در روی رتور، این سیگنال را دریافت کرده و آن را به یک ولتاژ DC پایدار جهت تغذیه استرین گیج ها، تبدیل می کنند. ولتاژ خروجی مدار پل که متناسب با مقدار گشتاور اندازه گیری شده می باشد، به ورودی مدار مبدل ولتاژ به فرکانس داده می شود. این بلوک قطاری از پالس ها را با فرکانس مشخص تولید می کند. فرکانس این پالس ها با ولتاژ خروجی پل متناسب هستند. این قطار پالس بعد از تقویت در مدار پیش تقویت کننده، به استاتور مبدل ارسال می شوند.
شکل 5 نوع دیگری از این مبدل ها را نشان می دهد که نسبت به حالت قبل ساختار فشرده تری دارند.
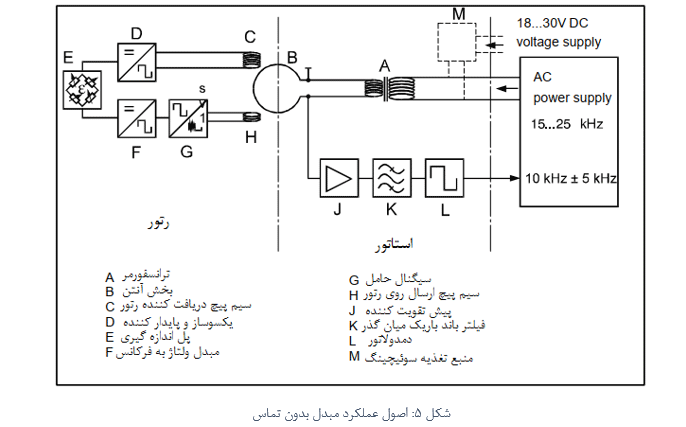
در این نوع مبدل ها، سیگنال AC توسط ترانسفورمر A به بخش آنتن مدار یعنی B منتقل می شود. وظیفه ترانسفورمر عمل تطبیق ولتاژ و امپدانس بین دو تطبقه می باشد. سپس این سیگنال از طریق آنتن به بخش C که یک سیم پیچ روی رتور می باشد، القا می شود. سیگنال دریافتی توسط بلوک C به بلوک D که وظیفه یکسوسازی و پایدارسازی سیگنال را برعهده دارد، داده می شود. بلوک D ولتاژ DC لازم جهت تغذیه پل وتستون را در اختیار بلوک E قرار می دهد. بلوک F سیگنال اندازه گیری شده خروجی، توسط بلوک E را به فرکانس متناظر آن تبدیل می کند. سپس این سیگنال در بلوک G مدوله شده و توسط بلوک H که یک سیم پیچ روی رتور است، دوباره به بخش آنتن B روی استاتور ارسال می شود. سیگنال دریافتی در سمت استاتور از پیش تقویت کننده J عبور کرده و وارد یک فیلتر میانگذر باند باریک می شود. وظیفه این فیلتر جداسازی سیگنال های اندازه گیری شده از بقیه سیگنال ها مانند سیگنال های ورودی و نویز می باشد. و درنهایت خروجی فیلتر توسط بلوک دمدولاتور L آشکارسازی شده و سیگنال خروجی به صورت یک شکل موج مربعی در اختیار سیستم اندازه گیری قرار می گیرد. اگر به جای سیگنال AC از سیگنال DC استفاده شود، منبع تغذیه سوئیچینگ M ابتدا آن را به ولتاژ مربعی تبدیل کرده و در اختیار بلوک های دیگر قرار می دهد.
روش های اندازه گیری گشتاور (3)
این فصل معیارهای اصلی را که باید هنگام انتخاب مبدل گشتاور و پیکربندی یک برنامه کاربردی در نظر داشت، خلاصه می کند.
بسته به مبدل گشتاور مربوطه، سرعت و زاویه چرخش توسط یک سیستم مغناطیسی یا نوری اندازه گیری می شود. هنگامی که روتور می چرخد، پالس های ولتاژ با توجه به تعداد دندانه ها یا شکاف ها در هر دور تولید می شود و فرکانس این پالس ها متناسب با سرعت چرخش است.
آشکارسازهای پیک سیگنال یا دیودهای آشکارساز طوری قرار می گیرند که سیگنال خروجی آنها 90 درجه ازهم اختلاف فاز داشته باشند.
این تغییر فاز اطلاعاتی را در مورد جهتی که مبدل در آن می چرخد، ارائه می دهد. یک پیش تقویت کننده، قطارهای پالس را به ولتاژهای موج مربعی خالص تبدیل می کند. توجه به این نکته حائز اهمیت است که آیا این سیستم ها می توانند سرعت و زاویه چرخش را بدون محدودیت بدست آورند یا خیر. معیار مهم در این شرایط حداقل سرعت چرخش برای دستیابی به پایداری پالس در خروجی است. اگر حداقل سرعت چرخش صفر باشد، می توان از سیستم بدون محدودیت برای اندازه گیری زاویه و سرعت چرخش استفاده کرد. اگر حداقل سرعت چرخش بیشتر از صفر باشد، سیستم برای اندازه گیری سرعت چرخش مناسب است، اما مناسب بودن آن برای اندازه گیری زاویه چرخش باید مورد بررسی قرار گیرد.
اندازه گیری سرعت چرخش مغناطیسی، به سیستم های دارای حسگر اثر هال و سیستم های القایی مربوط می شود. در سیستم های القایی، روتور دارای یک حلقه دندانه دار است که در مقابل آن سرهای پیکاپ القایی در استاتور وجود دارد (شکل 6 را ببینید). سرهای پیکاپ القایی به تغییرات تاثیرات فلزی واکنش نشان می دهند. سیستم های دارای حسگر هال به تغییرات میدان مغناطیسی واکنش نشان می دهند. بنابراین بخش دوار، بسته به وضوح مورد نیاز، یک یا چند آهنربا را حمل می کند. از آنجایی که هر دو
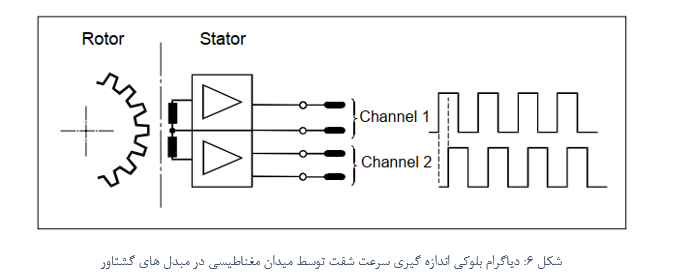
سیستم برای دستیابی به پایداری پالس کافی به حداقل سرعت چرخش نیاز دارند، مناسب بودن آنها برای اندازهگیری زاویه چرخش محدود است.
3-2 اندازه گیری سرعت چرخش و زاویه چرخش توسط تجهیزات نوری:
شکل 7 ساختار سیستم های نوری جهت اندازه گیری زاویه و سرعت چرخش را نشان می دهد.
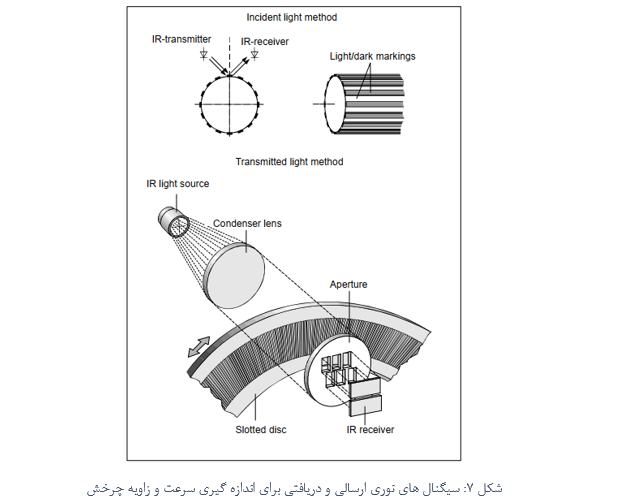
روش نور عبوری به طور معمول درجه بالایی از قابلیت اطمینان را نشان می دهد و بنابراین ما فقط از این نوع روش اندازه گیری برای مبدل های گشتاور خودمان استفاده می کنیم. با توجه به شرایط مرزی مورد نیاز، فقط از دیسک های فلزی شکاف دار استفاده می شود. تعداد شکاف های مکانیکی در هر دور، بسته به اندازه و نوع نصب متفاوت می باشد.
در شرایط خاص، فلنجهای گشتاوری که بدون یاتاقان ساخته میشوند میتوانند سیگنالهای سرعت چرخش دورهای را حتی زمانی که در حالت سکون هستند از خود نشان دهند. این اثر به دلیل ارتعاش شعاعی روتور است که باعث می شود موقعیت دیسک شکافدار نسبت به سنسور نوری تغییر کند.
در مورد شفت های گشتاور با یاتاقان ها، حداقل سرعت چرخش برای پایداری پالس کافی صفر است، به این معنی که می توان از آنها بدون محدودیت برای اندازه گیری زاویه و سرعت چرخش استفاده کرد.
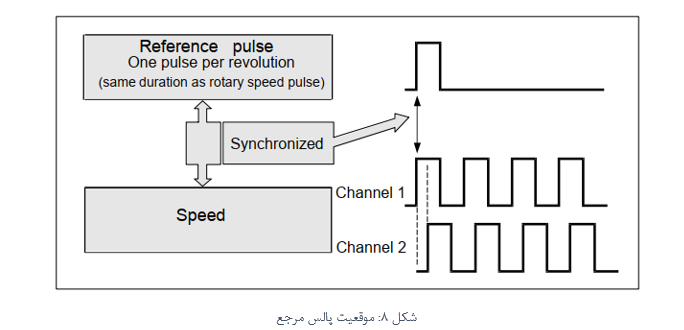
3-3 پالس مرجع:
فلنج های گشتاور نسل جدید نه تنها دارای یک سیستم اندازه گیری سرعت چرخش هستند بلکه یک پالس مرجع نیز دارند. این توسط یک آهنربا در دیسک شکافدار و یک حسگر مغناطیسی مقاومتی ایجاد می شود که در هر دور کامل روتور یک پالس ایجاد می کند. این پالس مرجع با سیگنال خروجی سرعت چرخشی در کانال 1 هماهنگ می شود. شکل 8 موقعیت الکتریکی پالس مرجع را نشان می دهد.
مبدل هایی که سیگنال خروجی اندازه گیری شده آنها توسط حلقه های لغزنده منتقل می شوند، کاملا پسیو می باشند. خروجی این مبدل ها بر حسب نسبت سیگنال خروجی به ورودی mV⁄V تعریف می شود. این مبدل ها برای ایجاد سیگنال های اندازه گیری شده خروجی، نیاز به ولتاژ تغذیه ورودی دارند. ولتاژ خروجی آنها خیلی کوچک و در حد چند میلی ولت می باشد. به عنوان مثال در یک مبدل با حساسیت 2mV⁄V و با ولتاژ ورودی 5 ولت، حداکثر ولتاژ خروجی در حد 10 میلی ولت می باشد.
این ولتاژ در یک تقویت کننده پایین دستی تقویت می شود، سپس ارزیابی شده و به سیگنال خروجی مناسب تبدیل می شود. برای این منظور از تقویت کننده های DC و یا AC به همراه فرکانس حامل استفاده می شود. نمی توان اظهار نظر واضحی در مورد نوع تقویت کننده مورد استفاده، کرد زیرا هر دو روش دارای مزایا و معایب مربوط به خود هستند.
روش های اندازه گیری گشتاور (4)
مبدل های گشتاور را می توان در هر جهت مناسب با توجه به جهت گرانش نصب کرد. در این مقاله شما با انواع روش های نصب مبدل های گشتاور آشنا خواهید شد
تقویت کننده های AC دارای فرکانس حامل بیشتر برای استفاده ترجیح داده می شوند. زیرا در این نوع تقویت کننده ها، هر گونه تداخل قوس برس روی حلقه های لغزنده تأثیری در سیگنال خروجی ندارد زیرا این سیگنال ها خارج از محدوده فرکانس حامل هستند، و ولتاژهای القایی حرارتی تأثیری بر سیگنال اندازه گیری ندارند.
در مبدل های گشتاور بدون تماس، فرکانس سیگنال خروجی گشتاور استاندارد معمولا 10KH±5KH می باشد.
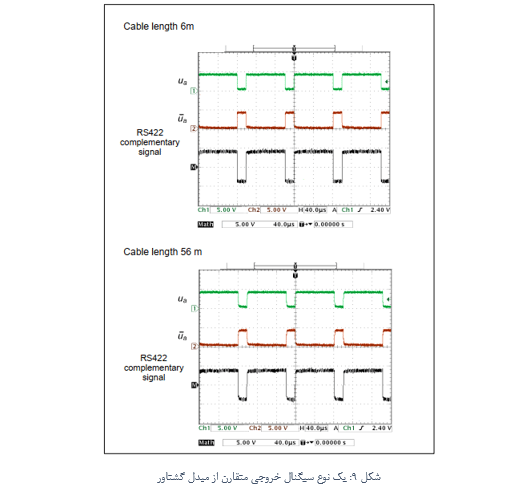
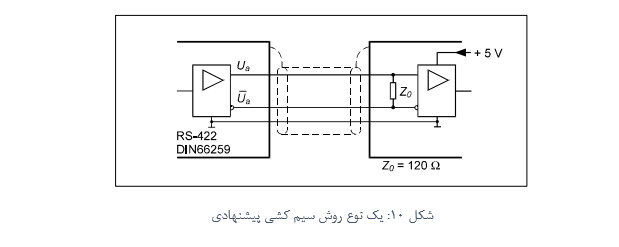
سیگنال های فرکانس خروجی، بسته به ساختار الکترونیکی استاتور،یا به صورت متقارن (سیگنال های مکمل RS422) و یا نامتقارن (12 ولت) هستند. سیگنال های مکمل RS422 به یک ورودی دیفرانسیل در سمت پردازش نیاز دارند. شکل 9 سیگنال خروجی متقارن از یک مبدل را نشان می دهد و شکل 10 یک نوع سیم کشی پیشنهادی برای بخش الکترونیک مدار را نشان می دهد.
گیرنده های دیفرانسیلی توصیه شده LTC485، MAX485، MAX487 یا IL485 هستند. در حالی که مقاومت پایان خط Z0 کاملا ضروری نیست، اما زمانی که طول کابل قابل توجه باشد، استفاده از آن توصیه می شود، تا از بازتاب انتهای خط به دلیل عدم تطابق جلوگیری شود.
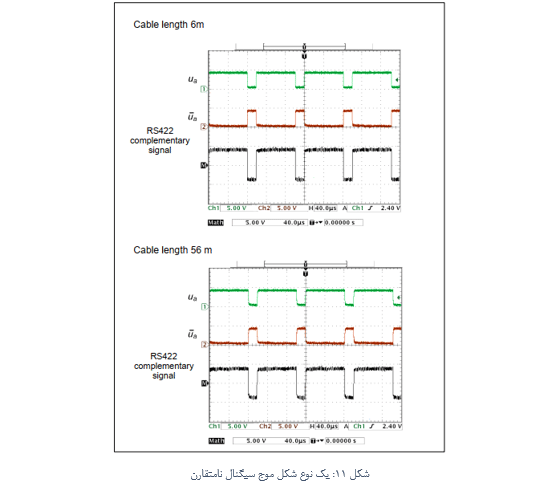
سیگنال های نامتقارن نسبت به زمین اندازه گیری می شوند. یک شکل موج مربوطه در شکل 11 نشان داده شده است. تاثیر طول کابل بر شکل سیگنال به وضوح قابل مشاهده است.
برخی از مبدل های گشتاور با منبع ولتاژ DC نه تنها دارای خروجی فرکانس هستند، بلکه به صورت اختیاری استاتورهای آنها می توانند خروجی آنالوگ ±10V ولت برای گشتاور داشته باشند. نوع دیگری از مبدل ها فقط خروجی آنالوگ ±10V ولتی برای سیگنال گشتاور دارند. خروجی آنالوگ ±10V ولت امکان توسعه برنامه های کاربردی مستقل بسیار مقرون به صرفهای را فراهم می کند، زیرا نیازی به تقویت کننده اندازه گیری اضافی نیست.
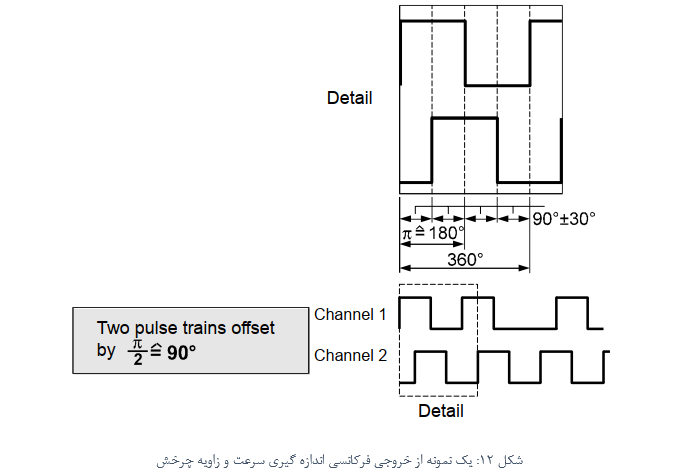
سیگنال های فرکانس خروجی یا سیگنال های مکمل RS422، سطح TTL یا سایر سیگنال های نامتقارن 5 تا 25 ولت هستند. معمولا دو کانال موجود است که با هم اختلاف فاز 90 درجهای دارند. این کانال ها در حین اندازه گیری سرعت چرخش، به منظور تشخیص جهت چرخش استفاده می شوند. بسته به اینکه کدام کانال از نظر فازی نسبت به کانال دیگر دارای تاخیر 90 درجهای است، می توان جهت چرخش مثبت و منفی را تشخیص داد.
مطالب پیشنهادی برای شما
اندازه گیری گشتاور (1)
اندازهگیری دقیق گشتاور، در صنعت، بسیار مهم و حیاتی می باشد، در اینجا با نحوه اندازه گیری گشتاور آشنا می شوید
اندازه گیری گشتاور (2)
در این مقاله شما با ساختار مکانیکی و الکتریکی انواع مبدل های گشتاور چرخان و غیر چرخان آشنا خواهید شد
اندازه گیری گشتاور (3)
این فصل معیارهای اصلی را که هنگام انتخاب مبدل گشتاور و پیکربندی یک برنامه کاربردی نیاز است، خلاصه می کند.
اندازه گیری گشتاور (4)
مبدل های گشتاور با روش های مختلف نصب می شوند. در اینجا با انواع روش های نصب این مبدل ها آشنا خواهید شد