روش های اندازه گیری گشتاور (3)
این فصل معیارهای اصلی را که باید هنگام انتخاب مبدل گشتاور و پیکربندی یک برنامه کاربردی در نظر داشت، خلاصه می کند.
روش های اندازه گیری گشتاور (3)
این فصل معیارهای اصلی را که باید هنگام انتخاب مبدل گشتاور و پیکربندی یک برنامه کاربردی در نظر داشت، خلاصه می کند.
این فصل معیارهای اصلی را که باید هنگام انتخاب مبدل گشتاور و پیکربندی یک برنامه کاربردی در نظر داشت، خلاصه می کند. همچنین ویژگیهای کلی سیستم و مبدلهای گشتاور و نحوه تعامل آنها توضیح داده خواهد شد.
برای تصمیم گیری در مورد اینکه آیا می توان خواص مورد نظر مبدل گشتاور را با توجه به محیط داده شده به گونه ای تعریف کرد که سیستم کلی با هم تطبیق پیدا کند، سؤالات آزمایشی مختلفی را می توان پرسید یا اینکه آیا رویکرد مخالف را در پیش گرفت، یعنی طراحی محیط پس از مشخص کردن ویژگیهای مبدل گشتاور به طوری که ویژگیهای سیستم کلی با هم هماهنگ میشوند.
هنگامی که یک مبدل گشتاور مناسب برای یک برنامه مشخص یا برنامه ریزی شده انتخاب می شود، معیارهای هندسی اغلب می تواند بسیار مهم باشد. این معیارها از یک سو به ابعاد خارجی اشاره دارد که از می تواند بر انتخاب طرح تأثیر بگذارد. از سوی دیگر، روش های اتصال مکانیکی مبدل ها را هم دربر دارد، به عنوان مثال در تصمیم گیری بین اتصال فلنجی یا اتصال شفت.
جرم مبدل گشتاور بر میزان افت احتمالی و به همین ترتیب، ارتعاش خمشی احتمالی تأثیر دارد. هر چه جرم بیشتر باشد خمش بیشتر و در نتیجه فرکانس خمش طبیعی کمتر می شود. با این حال، این اثر را نمی توان جدا از اجزای دیگر مورد بحث قرار داد. این موضوع کاملا به سفتی خمشی کوپلینگ ها و بخش های محوری که از روتور روی مبدل گشتاور پشتیبانی می کنند، بستگی دارد. تعداد و آرایش یاتاقانهای پشتیبانی کننده، تعداد شفت های کاربرد مورد نظر، تاثیر تعیینکنندهای بر سختی موثر بخشهای شفت دارد. چیدمان سفت یاتاقان ها میتوانند جرم های سنگینتری را پشتیبانی کنند.چیدمان سفت یاتاقان با استفاده از چندین نقطه نگهدارنده با فاصله نزدیک یا یاتاقان های دو ردیفه در آرایشی که می تواند ممان های خمشی را نیز جذب کند، به وجود می آید.
گشتاور جرمی اینرسی معیاری از مقاومتی است که جسم در برابر شتاب چرخشی نشان می دهد. در مورد مبدل گشتاور، از آنجایی که محور حرکت دورانی مورد نظر قبلا مشخص شده است، در نتیجه تنها اطلاعات مورد نیاز، یک گشتاور جرمی منحصر به فرد اینرسی است. گشتاور جرمی اینرسی از یک سو با جرم جسم و از سوی دیگر با توزیع آن جرم با توجه به فاصله آن از محور چرخش تعیین می شود. هر چه میانگین فاصله جرم از محور چرخش بیشتر باشد، گشتاور جرمی اینرسی بیشتر است.
در ماشین های دوار، گشتاور جرمی اینرسی به طور کلی بر شتاب دورانی که می تواند در یک گشتاور معین به دست آید، یا مقدار گشتاور مورد نیاز برای رسیدن به شتاب دورانی مورد نظر، تاثیر دارد. با این حال، باید توجه داشت که گشتاور جرمی اینرسی که به این مفهوم مربوط می شود، مجموع گشتاورهای جرمی اینرسی تعداد زیادی از اجزا در قطار شفت است. بنابراین، در بسیاری از کاربردها، تاثیر گشتاور جرمی اینرسی مبدل گشتاور عامل تعیین کننده نیست.
گشتاور جرمی اینرسی مبدل گشتاور می تواند تاثیر عمیقی در کاربردهایی با کنترل سرعت با عملکرد بالا داشته باشد. همین امر در مورد بسیاری از تجهیزات تولیدی که در آنها شتاب گیری سریع و به دنبال آن شتاب منفی و تغییر جهت وجود دارد، صدق می کند.
موضوع مهم دیگر، تاثیری است که گشتاورهای جرمی اینرسی اجزای جداگانه بر خواص ارتعاش پیچشی دارند. گشتاور جرمی اینرسی همان نقشی را در ارتعاش پیچشی ایفا می کند که جرم در ارتعاش خمشی ایفا می کند. بنابراین هرچه گشتاور جرمی اینرسی بیشتر باشد، فرکانس های طبیعی برای همان درجه سختی کمتر است. در بسیاری از موارد، گشتاور جرمی اینرسی مبدل گشتاور، در مقایسه با ممان اینرسی سایر اجزاء در قطار شفت ناچیز است، به عنوان مثال، گشتاور جرمی اینرسی موتورهای احتراق داخلی، ماشینهای الکتریکی، گیربکسها و چرخ فلایویلها.
به طور کلی، مبدل گشتاوری که بر اساس اصل استرین گیج ها کار میکند باید دارای درجه خاصی از کشش باشد، زیرا اندازهگیری گشتاور با استفاده از استرین گیج، گشتاور را بهطور غیرمستقیم از طریق کرنش به دست میآورد و یک بدنه اندازهگیری کاملا سفت و سخت اجازه نمیدهد هیچ کرنشی وجود داشته باشد. کشش به طور کلی با اطلاعات مربوط به سفتی پیچشی، خمشی، شعاعی و محوری توصیف میشود. به طور کلی می توان گفت که فلنج های گشتاور، از هر نظر سفت تر از شفت های گشتاور معمولی هستند.
اهمیت سختی از نظر چیدمان تا حدی در این واقعیت قابل مشاهده است که برخی از مفاهیم طراحی برای نصب مبدل گشتاور در قطار شفت تا حد زیادی توسط سختی تعیین می شود. به عنوان مثال، از یک سو، بارگذاری مزاحم که در یک مبدل بسیار ارتجاعی به دلیل خطاهای بالانس، زمانی که کوپلینگ ها یا شفت های مشترک کنار گذاشته می شوند، ایجاد می شود، کمتر از مبدل های بسیار سفت است.
از طرف دیگر یک مبدل گشتاور بسیار سفت می تواند وزن ذاتی اجزای خاص را در بخش شفت به راحتی تحمل کند. دومین کمیت مرتبط با هر نوع ضریب سختی، حداکثر ظرفیت بارگذاری آن با توجه به نیرو یا گشتاور مربوطه است.
سفتی جهتی در یک مبدل گشتاور نیز تاثیر زیادی بر خواص ارتعاشی قطار شفت دارد، همیشه سفتی بالاتر منجر به فرکانس های طبیعی بالاتر در ارتعاشات مربوطه می شود در حالی که سفتی کمتر منجر به فرکانس های طبیعی پایین تر می شود. کمیت مهم تاثیر گذار دیگر علاوه بر انواع مختلف سختی، گشتاور جرمی یا جرمی اینرسی است.
سفتی پیچشی، رابطه بین گشتاور و پیچش الاستیک حول محور چرخش را توصیف می کند. اثر متقابل بین سختی و جرم یا گشتاورهای جرم که در بالا ذکر شد، بر حساسیت پیکربندی نسبت به ارتعاشات پیچشی تاثیر دارد. فلنجهای گشتاور فشرده، سفتی پیچشی را نشان میدهند که نسبت به گشتاور اسمی آنها بسیار بالاست.
سفتی خمشی رابطه بین لنگر خمشی و زاویه خمش الاستیک را توصیف می کند. اثر متقابل بین سختی و جرم یا گشتاورهای جرم که در بالا ذکر شد، بر حساسیت پیکربندی نسبت به ارتعاشات خمشی تاثیر دارد. در مقابل، در مورد شفت های انعطاف پذیر، نسبت بین نیروی خمشی و شعاعی نیز به عنوان سختی خمشی شناخته می شود.
سفتی شعاعی رابطه بین نیرویی در جهت شعاعی و حرکت شعاعی موازی در جهت مخالف را که در هر دو وجه جلویی مبدل گشتاور ایجاد می کند، توصیف می کند. همانند تغییر شکل خمشی، تغییر شکل شعاعی باعث خروج از مرکز نسبت به محور چرخش می شود. اثر متقابل بین سختی و جرم یا گشتاورهای جرم که در بالا ذکر شد، بر حساسیت پیکربندی نسبت به ارتعاش خمشی نیز تاثیر دارد. نحوه تاثیر سفتی شعاعی بر فرکانس های طبیعی از نظر کیفی مانند سفتی خمشی است.
سفتی خمشی و شعاعی در فلنج های گشتاور فشرده ساخته شده در بالاترین حد خود است
سختی محوری رابطه بین نیروی طولی و تغییر طولی که در مبدل گشتاور ایجاد می کند را توصیف می کند. اثر متقابل بین سختی و جرم یا گشتاورهای جرم که در بالا توضیح داده شد، بر حساسیت پیکربندی نسبت به ارتعاش محوری تاثیر می گذارد.
مبدل گشتاور و کوپلینگ باید در تمام سرعت های کاری بدون آسیب باقی بمانند. بنابراین سرعت های اسمی نشان داده شده در مشخصات مبدل ها، حداقل باید با حداکثر سرعت عملیاتی که احتمال وقوع دارد مطابقت داشته باشد. جهت چرخش در این مورد مهم نیست.
بسیاری از مبدلهای گشتاور ما دارای یک سیستم اندازهگیری سرعت به صورت استاندارد یا به صورت آپشن هستند، و در برخی نیز یک سیستم اندازهگیری برای زاویه چرخش تعبیه شده است. برای قضاوت در مورد اینکه آیا چنین سیستمی برای کاربرد مورد نظر مناسب است یا نه، ابتدا باید در نظر گرفت که آیا اندازه گیری جهت و احتمالا زاویه چرخش علاوه بر سرعت برای کاربرد مورد نظر نیاز است، و آیا سیستم مورد بررسی به حداقل سرعت جهت اندازه گیری پایدار سیگنال نیاز دارد یا خیر. برای سیگنال اندازه گیری میزان تفکیک پذیری نیز باید در نظر گرفته شود. از سوی دیگر، تعداد پالس های تولید شده توسط سیستم در هر دور نیز باید با توجه به سرعت در نظر گرفته شود، زیرا در سرعت های بسیار بالا همراه با تعداد پالس های بالا، سیگنال خروجی اغلب در فرکانس بالایی قرار دارد که نمی توان آن را آسان تجزیه و تحلیل کرد.
نیازهای تعمیر و نگهداری نقش مهمی را ایفا می کنند. مبدلهای گشتاور با حلقههای لغزنده نیاز به تعمیر و نگهداری منظم دارند، به ویژه از آنجایی که عمر مفید برسهای حلقه لغزنده محدود است. گریس مورد استفاده به عنوان روان کننده در دندانه های کوپلینگ باید به طور دوره ای تعویض شود. مبدلهای گشتاور با انتقال سیگنال اندازهگیری بدون تماس و یاتاقانها به دلیل طول عمر بسیار بالای یاتاقانهایشان، نیاز به تعمیر و نگهداری بسیار کمتری دارند، اما نمیتوان گفت که بدون نیاز به تعمیر و نگهداری هستند. مبدلهای گشتاور که بدون یاتاقان ساخته میشوند و دارای انتقال سیگنال اندازهگیری بدون تماس هستند، بدون نیاز به تعمیر و نگهداری و بدون ساییدگی هستند. سیستمهای نوری باز برای اندازهگیری سرعت، در صورت استفاده در شرایط نامساعد، خطر آلودگی را به همراه دارند. دستورالعمل های تمیز کردن آنها در اسناد فنی مربوطه نشان داده شده است.
تقریبا در همه موارد، یک تخمین تقریبی از گشتاور مورد انتظار در یک برنامه کاربردی در مرحله طراحی در دسترس خواهد بود. این تخمین بر اساس مواردی مانند گشتاور اسمی ماشینهایی است که سیستم را به حرکت در میآورند (موتورهای احتراق داخلی، موتورهای الکتریکی) و یا بر اساس گشتاور اسمی محرکه ها مانند پمپها، کمپرسورها، همزنها و.. می باشد.
با این حال، باید توجه داشت که در بیشتر بخشهای ماشینسازی، عبارت گشتاور اسمی به معنای گشتاور متوسطی است که میتواند در یک مدت نسبتا طولانی حفظ شود، و پیک گشتاور اغلب به طور قابل توجهی بالاتر از این مقدار است. از طرف دیگر، در مورد مبدل گشتاور، گشتاور اسمی به حد بالای محدوده اندازه گیری آن اشاره دارد، به عبارت دیگر این حدی است که در عملکرد عادی نباید گشتاور از آن مقدار تجاوز کند.
اغلب می توان از رابطه بین گشتاور، سرعت و قدرت مکانیکی برای محاسبه گشتاور اسمی که به صراحت

مشخص نشده است، استفاده کرد. در این مورد P توان (W) و Ω به سرعت زاویه ای اشاره دارد (s-1 یا همان rad/s). اگر فرمول بالا برای گشتاور مرتب شود و سرعت زاویه ای با سرعت n بر حسب min-1 جایگزین شود، به دست می آوریم:

البته این تقریب جهت استفاده به یک ضریب ایمنی مناسب نیز نیاز دارد. این مورد در زیر بیشتر توضیح داده خواهد شد.
روش های اندازه گیری گشتاور (1)
اندازهگیری دقیق گشتاور، بهویژه در ماشین های چرخان، تقاضاهای سنگینی را از طرف تولیدکنندگان و میزهای آزمایش ایجاد میکند، در اینجا شما با نحوه اندازه گیری گشتاور آشنا می شوید
هنگام انتخاب مبدل گشتاور، گشتاور دینامیکی پیشبینیشده باید تا حد امکان دقیق باشد، زیرا اغلب حداکثر گشتاور واقعی تنها از پیکهای گشتاور دینامیکی مشخص میشود. در نتیجه گشتاور حداکثر و گشتاور نامی، می توانند در ترکیب با فاکتورهای ایمنی مناسب برای انتخاب یک مبدل گشتاور خاص یا یک گشتاور نامی خاص استفاده شوند. اگر انتظارمان این است که چرخه ارتعاش در سیستم مورد نظر بالا است ، مبدل باید از منظر قدرت خستگی انتخاب شود. سپس مشخصات پهنای باند ارتعاش باید با بارگذاری دینامیکی قابل پیش بینی مقایسه شود.
بخشهای بعدی مکانیسمهای واقعی را که میتوانند باعث ایجاد گشتاور دینامیکی شوند، مورد بحث قرار خواهند داد. ارتعاش پیچشی عمدا حذف شده است، زیرا ارتعاش به خودی خود معمولا باعث ایجاد مولفه های دینامیکی در گشتاور نمی شود، بلکه به عنوان یک مکانیسم تقویت کننده عمل می کند.
برای شروع چرخش جسم یا تغییر سرعت چرخش آن، قضیه گشتاورها از مهندسی مکانیک حکم می کند که یک نیروی گشتاور باید به آن اعمال شود. بنابراین رابطه را می توان به صورت یک بعدی در نظر گرفت. کل گشتاور فعال را می توان به طور معنی داری به عنوان اختلاف بین گشتاور انتهای محرک MDin و گشتاور انتهایی MDout نشان داد، همانطور که به صورت نموداری در شکل 1 نشان داده شده است.
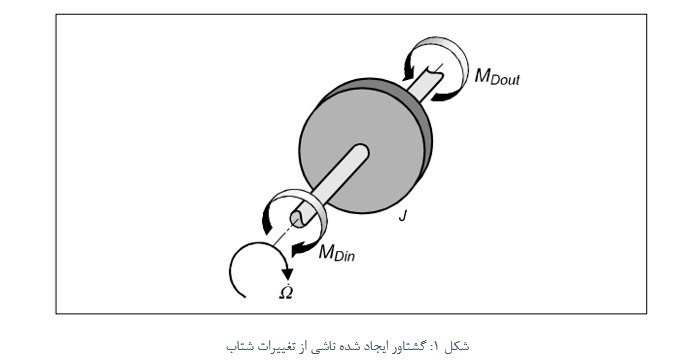

در این مورد، نقطه بالای متغیر، مشتق متغیر را نسبت به زمان مشخص میکند، که به موجب آن  شتاب چرخشی است. گشتاور جرمی اینرسی J که باید در اینجا استفاده شود به قسمتی از قطار شفت بستگی دارد که قضیه گشتاورها برای آن قسمت اعمال می شود. در این حالت، مقادیر گشتاوری که باید جایگزین MDin و MDout شوند، گشتاورهای متقاطعی هستند که در انتهای بخش مربوطه در نظر گرفته شده، به عنوان یک واحد عمل می کنند. این به معنای گشتاور داخلی است که در این نقاط از قطار شفت عمل می کند.
شتاب چرخشی است. گشتاور جرمی اینرسی J که باید در اینجا استفاده شود به قسمتی از قطار شفت بستگی دارد که قضیه گشتاورها برای آن قسمت اعمال می شود. در این حالت، مقادیر گشتاوری که باید جایگزین MDin و MDout شوند، گشتاورهای متقاطعی هستند که در انتهای بخش مربوطه در نظر گرفته شده، به عنوان یک واحد عمل می کنند. این به معنای گشتاور داخلی است که در این نقاط از قطار شفت عمل می کند.
کاربرد توصیف شده از قضیه گشتاورها را می توان بدون هیچ مشکلی حتی در مورد انتقال در قطار شفت تعمیم داد. اگر سرعتهای زاویهای مختلف تک تک بخشهای شافت را بهصورت Ω1، Ω2، ... و گشتاورهای جرمی اینرسی این بخشهای شافت را بهعنوان J1، J2...، ... تعیین کنیم، قضیه گشتاورها نتیجه را برای گشتاور به شکل زیر به دست میدهد:

به ویژه در مرحله پیکربندی، شتاب های چرخشی که در یک برنامه کاربردی عمل می کنند اغلب ناشناخته هستند. اما اگر تغییر سرعت و بازه زمانی که این تغییر در آن رخ می دهد مشخص باشد، می توان یک تخمین ساده انجام داد.
با فرض ثابت بودن شتاب دورانی:

با این حال، هنگام تخمین زدن از این نوع، باید در نظر داشت که شتاب چرخشی ثابت مطلوبترین حالت ممکن را نشان میدهد. اگر شتاب چرخشی ثابت نباشد اما همان تغییر کلی سرعت در همان بازه زمانی حاصل شود، شتاب دورانی حتی باید بیشتر به طور موقت رخ دهد. معمولا در عمل چنین است. در بدترین حالت ممکن است حتی پیک های گشتاور ضربه مانند می تواند وجود داشته باشد.
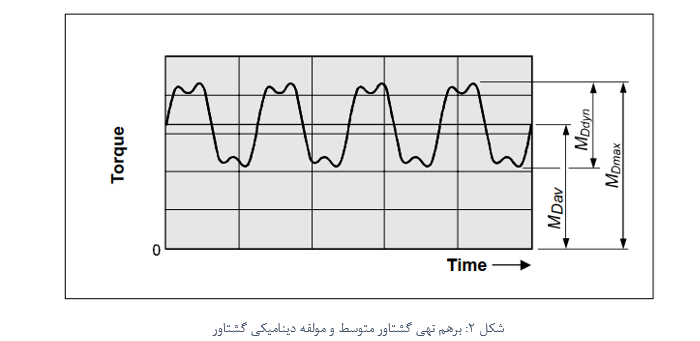
در این بخش، گشتاور نوسانی به این معناست که یک گشتاور متناوب (مولفه دینامیکی) بر روی یک گشتاوری قرار میگیرد که ثابت است یا به آرامی در طول زمان تغییر میکند (گشتاور متوسط).
جز نوسانی ممکن است دوره ای باشد یا نباشد. این بخش بیشترین توجه را به منابعی دارد که باعث ایجاد این رفتار مرتبط با زمان در گشتاور می شود.
اساس گشتاور نوسانی در شکل 2 نشان داده شده است. در این مثال گشتاور متوسط ثابت، و جزء دینامیکی آن تناوبی است. یک جزء دینامیکی دوره ای یا شبه تناوبی از این نوع، نمونه ای از بسیاری از اثراتی است که در عمل رخ می دهد:
اولین دلیل برای اهمیت زیاد گشتاور نوسانی این است که چون روی گشتاور متوسط قرار می گیرد، باعث می شود حداکثر گشتاور به طور قابل توجهی بالاتر از گشتاور متوسط باشد. به عنوان یک قاعده، این بدان معنی است که هنگام پیکربندی یک قطار شفت، و به ویژه هنگام انتخاب یک مبدل گشتاور، اگر اجزای گشتاور دینامیکی شناخته نشده باشند، باید تخمین زده شوند.
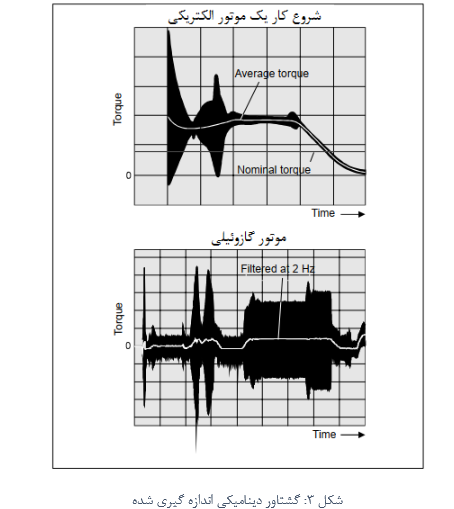
دو مثال عملی در شکل 3 نشان داده شده است. یک فیلتر پایین گذر برای مشاهده میانگین گشتاور استفاده شد. اثر یک فیلتر پایین گذر مکانیکی هم تقریبا شبیه همین است، اگرچه در این مورد همه اجزای مکانیکی در میز آزمایش، در واقع زیاد در معرض مولفه گشتاور پویا قرار نمی گیرند.
یک اندازه گیری کمی از مقدار گشتاور نوسانی نسبت به گشتاور متوسط مؤثر، فاکتور شوک است که به عنوان نسبت حداکثر گشتاور به گشتاور متوسط تعریف می شود:
می توان یک بیان کلی داشت که فاکتورهای شوک در موتورهای احتراق داخلی عموما بین 2 تا 10 است. پیشینه این موضوع و رابطه بین تعداد سیلندرها و اساس موضوع (اتو یا دیزل) در زیر توضیح داده خواهد شد.
دلیل دوم اهمیت زیاد گشتاور نوسانی، نقش آن به عنوان یک محرک احتمالی برای ارتعاش پیچشی است. برای در نظر گرفتن این جنبه لازم است هم دامنه و هم فرکانس مولفه دینامیکی گشتاور بررسی شود. لازم به ذکر است که اگر گشتاور نوسانی متناوب به شکل سینوسی خالص نباشد، شکل موج گشتاور نه تنها شامل فرکانس اصلی، بلکه مولفه هایی از فرکانس در آن حضور خواهد داشت که مضرب صحیحی از فرکانس اصلی هستند.
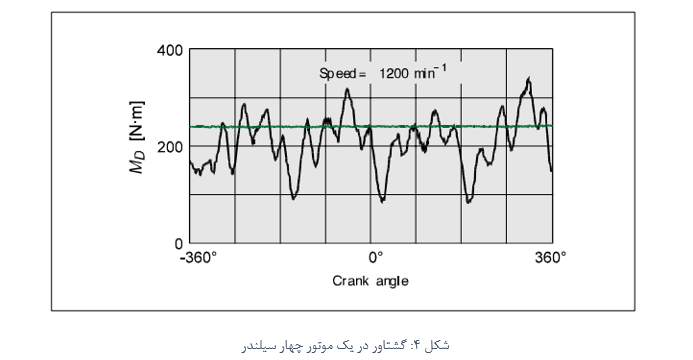
یکی از جاهای متداول که در آن گشتاور نوسانی به شدت قوی رخ می دهد، موتور احتراق داخلی است. در ارتباط با اندازهگیری گشتاور، چنین کاربردهایی معمولا در میزهای آزمایشی مختلف در صنعت خودرو یافت میشوند. علت نوسانات گشتاور، تبدیل حرکت نوسانی پیستون ها و شاتون ها به حرکت دورانی است. نیروهایی که در این فرآیند رخ میدهند و با استفاده از میلههای اتصال به گشتاور تبدیل میشوند، از یک سو نیروهای فشار گاز هستند که پیستونها را به حرکت در میآورند و از سوی دیگر نیروهای جرمی مورد نیاز برای شتاب دادن به جرمهای نوسانی هستند. شکل 4 منحنی گشتاور موتور دیزلی چهار سیلندر را در دو دور چرخش میل لنگ (یک سیکل عملیاتی کامل) نشان می دهد.
گشتاور گهگاه می تواند کاملا خلاف جهت گشتاور متوسط عمل کند. اثر نوسانات در حین استفاده عموما با کمک فلایویل ها بسیار کاهش می یابد. با توجه به تاثیر آنها بر اندازه گیری گشتاور، بسیار مهم است که مبدل گشتاور در بخش شفت بین موتور و فلایویل یا در خارج از آن قرار گرفته باشد. قوی ترین نوسانات گشتاور بین موتور و فلایویل اتفاق می افتد.
نکات زیر اغلب می تواند برای قضاوت در مورد نحوه رفتار انواع مختلف موتورها با توجه به گشتاور نوسانی مفید باشد:
فرکانس اساسی نوسان در موتور چهار زمانه K سیلندر عبارت است از:

فرکانس اساسی نوسان در موتور دو زمانه K سیلندر عبارت است از:

روش های اندازه گیری گشتاور (2)
در این مقاله شما با ساختار مکانیکی و الکتریکی انواع مبدل های گشتاور چرخان و غیر چرخان آشنا خواهید شد
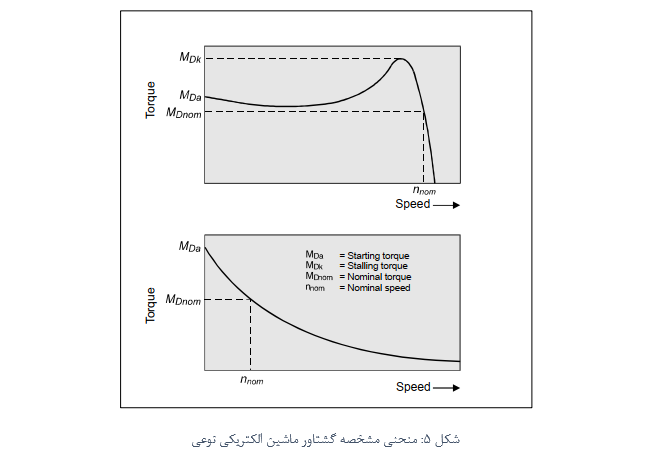
منحنی مشخصه یک ماشین الکتریکی، صرف نظر از اینکه موتور باشد یا ریتاردر نشان می دهد که گشتاور فعال به سرعت چرخش بستگی دارد. گشتاور تعیین شده به عنوان گشتاور اسمی در چنین ماشین هایی، گشتاور در سرعت نامی است. گشتاور حداکثر در این ماشین ها مخصوصا هنگام راه اندازی، به طور قابل توجهی بالاتر است.
همانطور که منحنی های مشخصه در شکل 5 نشان می دهند، گشتاور راه اندازی که یک ماشین می تواند در سرعت صفر اعمال کند، اغلب بیشتر از گشتاور اسمی است. در تصویر فوقانی که منحنی ماشینی با ویژگیهای شنت را نشان میدهد، اوج گشتاور دیگری که به نام گشتاور سکون شناخته میشود، درست زیر سرعت اسمی رخ میدهد. نمونه های معمولی عبارتند از موتورهای شنت-پیچ DC، موتورهای شنت-پیچ سه فاز، همه موتورهای قفس سنجابی و موتورهای حلقه لغزش. تصویر پایین نمونهای از ماشینی با ویژگیهای سری را نشان میدهد که در آن گشتاور به طور مداوم با افزایش سرعت کاهش مییابد. نمونه های معمولی عبارتند از موتورهای سری سیم پیچ DC، موتورهای سیم پیچ سری AC، موتورهای سری پیچ سه فاز و موتورهای دافعه. در هر دو مورد نیز باید در نظر گرفت که هنگام راه اندازی ، گشتاور موثر از گشتاور اسمی دستگاه بیشتر است.
لازم به ذکر است که منحنی های مشخصه مورد بحث در بالا، میانگین گشتاور را برای سرعت مورد نظر نشان می دهد. سایر اثراتی که در ماشینهای الکتریکی رخ میدهند باعث ایجاد مولفه های گشتاور دینامیکی اضافی میشوند. در تمام ماشینهای سه فازی که از شبکه تغذیه میکنند، نوسانات گشتاور در نتیجه برهمکنشهای الکترومغناطیسی گذرا بین ماشین و شبکه رخ میدهد. گشتاور راه اندازی در همه موتورهای سنکرون با نرخی دو برابر فرکانس لغزش غالب نوسان می کند. بنابراین هنگامی که ماشین های 50 هرتز در حال راه اندازی هستند، از فرکانس های 100 هرتز تا 0 هرتز عبور می کنند.
منبع دیگر افزایش گشتاور دینامیکی در ماشینهای الکتریکی ، سوئیچ از یک حالت به حالت عملیاتی دیگر است. یک مثال معمولی از این نوع، تغییر موتور الکتریکی از اتصال ستاره به اتصال مثلث است. گشتاور بسیار نامنظم می تواند در این شرایط رخ دهد.
اصطلاح بارهای انگلی به تمام گشتاورها و نیروهایی اطلاق می شود که علاوه بر کمیت اندازه گیری شده مورد نظر می توانند بر روی مبدل اثر بگذارند. در مورد مبدل گشتاور، اینها عمدتا نیروهای جانبی ، طولی و گشتاورهای خمشی هستند.
مبدل های گشتاور طوری طراحی شده اند که در حالت ایده آل تغییر شکل ناشی از بارهای انگلی هیچ تاثیری بر سیگنال اندازه گیری نداشته باشد. این امر با پیکربندی و سیمکشی SGها به روشی خاص به دست میآید که تضمین میکند سیگنالهای کرنش از SGهای منفرد به هم اضافه میشوند، مشروط بر اینکه کرنشهای مربوطه ناشی از گشتاور باشند، اما اگر کرنشها ناشی از بارهای انگلی باشند، یکدیگر را خنثی میکنند.
با این وجود، در صورتی که بار انگلی بسیار زیاد باشد، اثر گذاری متقابل بر روی سیگنال گشتاور امکان پذیر است، زیرا همیشه مقدار مشخصی از واریانس تولید وجود دارد. اما از آنجایی که چنین خطاهایی از نظر آماری پراکنده هستند، تأثیر یک بار انگلی معین بر سیگنال گشتاور قابل پیش بینی نیست. اگر اثر متقابل روی سیگنال گشتاور رخ دهد، بزرگی و علامت آن معمولا به ترتیب به جهت محور لنگر خمشی یا جهت نیروی جانبی بستگی دارد. بارهای انگلی اغلب می توانند به اندازه کافی بزرگ باشند که باعث تخریب مبدل گشتاور شوند.
از یک طرف بارهای انگلی می توانند مستقیما توسط نیروها و گشتاورهای خارجی وارد بر مبدل گشتاور ایجاد شوند. نمونه های معمولی وزن یک شفت مفصل یا نیروهای کششی روی یک تسمه قرقره است. از سوی دیگر، تمام بارهای انگلی ذکر شده نیز می تواند ناشی از شرایط نصب باشد، به دلیل اعوجاجی که در هنگام از بین رفتن عناصر جبران کننده (کوپلینگ ها، شفت های مشترک) در ارتباط با بالانس ناکافی اجزا در قطار شفت رخ می دهد.
توانایی یک مبدل گشتاور برای اندازه گیری، تنها در صورتی تضمین می شود که بارهای انگلی تا حدی تحت کنترل باشند.
همچنین باید در نظر داشت که ممکن است اثرات چندین بار انگلی به صورت همزمان روی همدیگر قرار بگیرند، بنابراین اگر قرار باشد که اثرات این بارها کاهش داده شود، اگر در یک زمان چندین تا از این بارها فعال باشند، باید دامنه تک تک این بارها را(گشتاورهای خمشی، نیروهای جانبی، نیروهای محوری) کاهش دهیم.
مانند گشتاور، بارهای انگلی نیز به عنوان یک قاعده دینامیک هستند. با این حال، مفید است که دو حالت ایده آل خاص را که در بسیاری از موارد نشان دهنده مهم ترین ویژگی های منحنی مربوط به زمان هستند، مشخص کنیم.
از یک طرف انواع بارهای انگلی وجود دارد که با مبدل گشتاور می چرخند. در سرعت ثابت، چنین بارهای انگلی به صورت ایستا بر روی مبدل گشتاور اثر می گذارند، و زمانی که تغییر سرعت به صورت تدریجی باشد ، به صورت شبه استاتیکی عمل می کنند. اگر در چنین حالتی اثر متقابل روی سیگنال گشتاور اتفاق بیفتد، به نظر می رسد یک مولفه ثابت به گشتاور اضافه می شود.
سایر بارهای انگلی بدون توجه به زاویه چرخش در یک جهت ثابت عمل می کنند و بنابراین از نظر مکانی ثابت هستند. در سرعت ثابت، بارهای انگلی از این نوع بر روی مبدل گشتاور به عنوان بارهای دوار عمل می کنند. اگر اثر گذاری متقابل بر روی سیگنال گشتاور رخ دهد، وابستگی جهت ذکر شده در بالا باعث می شود که بار انگلی به عنوان یک مولفه سیگنالی عمل کند که به عنوان تابعی از زاویه نوسان می کند.
این طبقه بندی هم برای نیروهای شعاعی و هم برای ممان های خمشی قابل استفاده است. از طرف دیگر در مورد نیروهای محوری بی معنی است. در مورد نیروها و گشتاورهای مستقیم خارجی، معمولا به راحتی می توان تشخیص داد که آیا بار به همراه مبدل می چرخد یا از نظر مکانی ثابت است. یک مثال کلاسیک از نیروی دوار مشترک، نیروی نامتعادل است و نیروهای ثابت مکانی معمولی، نیروهای وزنی یا نیروهای کششی در محرک های تسمه هستند.
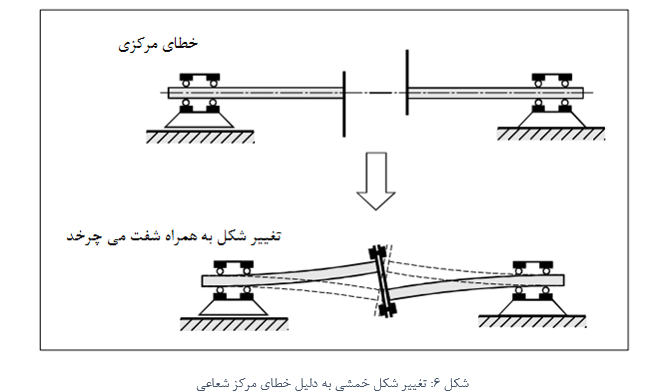
حتی در مورد بارهای انگلی که از اعوجاج های ناشی از ناهمترازی به وجود میآیند، هر دو حالت رخ می دهد. اگر دو بخش شفت نیاز به اتصال داشته باشند و محورهای آنها در یک راستا قرار گیرند اما عناصر اتصال در مرکز یا در زاویه درست روی محور قرار نگیرند، فرآیند مونتاژ منجر به تغییر شکل ناشی از اتصال چرخان می شود ،که باعث ایجاد نیروها یا گشتاورهای ناشی از اتصال می شود. تاثیر آن روی سایر قطعات مشترک دوار مانند مبدل گشتاور، به صورت اثر بار استاتیکی است. این وضعیت به عنوان خطای فلنج یا خطای مرکزی نامیده می شود (شکل 6 را ببینید).
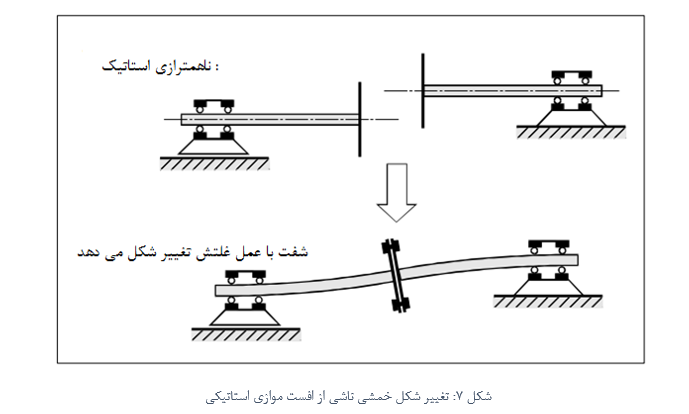
در مقابل، اگر محورهای دو بخش شفت که باید به هم وصل شوند، در یک راستا نباشند، این ناهماهنگی باعث ایجاد اعوجاج ثابت مکانی می شود. این امر تمام قطعات دوار را تحت تأثیر نیروها و/یا لنگرهای خمشی قرار می دهد که از دید ناظری که همراه با آنها می چرخد در حال چرخش هستند. چنین وضعیتی به عنوان مثال به دلیل یک ناهماهنگی استاتیکی که در مرحله مونتاژ به طور کامل حذف نشده است به وجود می آید (شکل 7 را ببینید).
روش های اندازه گیری گشتاور (4)
مبدل های گشتاور را می توان در هر جهت مناسب با توجه به جهت گرانش نصب کرد. در این مقاله شما با انواع روش های نصب مبدل های گشتاور آشنا خواهید شد
دقت مبدل های گشتاور به عوامل زیادی بستگی دارد، این عوامل عبارت اند از:
ترجمه این مشخصات به عبارات محاسباتی ملموس مستلزم دانش دقیق تعاریفی است که بر اساس آن ها ساخته شده اند. به همین دلیل خواننده ای که مایل به کسب اطلاعات بیشتر در مورد ارزیابی کمی جنبه های مختلف دقت است به فصل های بعدی ارجاع داده می شود.
در حالی که مبدل های گشتاور از نظر ساختاری محکم هستند، اما آنها ابزار الکترونیکی حساسی نیز هستند. برای اطمینان از عملکرد کامل آنها باید شرایط محیطی خاصی رعایت شود. شرایط محیطی سخت می تواند دقت چنین دستگاهی را کاهش دهد یا حتی توانایی عملکرد آن را مختل کند. در موارد شدید، شرایط محیطی مانند اثرات مضر مواد شیمیایی می تواند یک مبدل را از بین ببرد.
سازندگان به طور کلی شرایط محیطی را برای استفاده از مبدل های گشتاور خود تعریف می کنند و این موارد باید در انتخاب مبدل در نظر گرفته شوند. این شرایط اغلب می تواند با طراحی مناسب سایتی که مبدل در آن نصب می شود برآورده شود.
میزان محافظت دستگاه در برابر نفوذ اجسام خارجی و گرد و غبار در رقم اول کلاس حفاظت IP دو رقمی مطابق با DIN EN 60529 نشان داده شده است. گرد و غبار و سایر اجسام خارجی به اندازه کافی کوچک هستند که بتوانند به درون مبدل گشتاور راه پیدا کنند، و بر عملکرد صحیح مبدل گشتاور تاثیر بگذارند.
یافتن گرد و غبار تولید شده توسط سیستم های ترمز مکانیکی یا حتی دوده در مجاورت مبدل های گشتاور غیر معمول نیست. علاوه بر مسئله توانایی مبدل برای عملکرد صحیح آن، موضوع دیگری که برای ارزیابی حساسیت مبدل گشتاور نسبت به گرد و غبار مهم است، امکان شنت های مکانیکی یا الکتریکی می باشد. یک شنت مکانیکی (شنت گشتاور) به دلیل این واقعیت که تمام گشتاور از طریق نقطه اندازه گیری مورد نظر به مبدل هدایت نمی شود، باعث قرائت اشتباه در نتیجه اندازه گیری می شود. یک شنت الکتریکی توسط ذرات رسانای الکتریکی مانند گرد و غبار فلزی، دوده یا گرافیت ایجاد میشود که وقتی سیگنالهای الکتریکی مسیرهای نامشخصی را دنبال میکنند، یک قرائت نادرست ایجاد میکنند.
میزانی که مبدل گشتاور می تواند در معرض مایعات قرار گیرد با رقم دوم کلاس حفاظت IP نشان داده می شود. برای مبدل های گشتاور، نه تنها این مسئله وجود دارد که مبدل چقدر ضد آب است، بلکه همچنین احتمال وجود فعل و انفعالات شیمیایی نیز در آن وجود دارد، به خصوص اگر مایعاتی غیر از آب در آن دخیل باشند.
مبدل های گشتاور ممکن است در حین استفاده با مواد شیمیایی مختلف در تماس باشند. اینها می توانند شامل مواد تمیز کننده، روان کننده ها، سوخت ها و مایعات هیدرولیک باشند.
برهمکنش با مواد موجود در مبدل گشتاور ممکن است در SG (فویل پشتی، پوشش)، در مواد پلاستیکی روی روتور، در PCBهای الکترونیکی و حتی در فلزاتی که روتور و محفظه استاتور از آنها ساخته شدهاند، رخ دهد.
مواد شیمیایی مختلف بسیار زیادی وجود دارد که سازندگان مبدل گشتاور در موقعیتی نیستند که بتوانند اثرات هر ماده شیمیایی ممکن را بر هر جزء یا ماده ممکن در مبدل گشتاور پیش بینی کنند. این موضوع باید در هر مورد جداگانه بین کاربر و سازنده، بحث و شفاف سازی شود. این وظیفه سازنده است که مواد مورد استفاده را افشا کند. سپس کاربر می تواند از این اطلاعات برای بررسی وجود هرگونه ناسازگاری با مواد شیمیایی مورد انتظار در محیط عملیاتی استفاده کند.
هنگام تخمین شرایط حرارتی که هنگام استفاده از مبدل گشتاور با آن مواجه میشوید، بخشی از فرآیند در نظر گرفتن کامل شرایط در محیط خارجی (دمای بیرون یا دمای اتاق) است. جنبه دیگر در نظر گرفتن تغییرات دمایی است که هنگام اجرای برنامه به وجود می آید، در این مورد نه تنها منابع گرما، بلکه هر مکانیسم خنک کننده ای که ممکن است وجود داشته باشد، باید در نظر گرفته شود.
از آنجایی که اصل اندازهگیری معمول مبتنی بر استرین گیج ها، گشتاور را به طور غیرمستقیم از اندازهگیری کرنش تعیین میکند، مهم است که برهمکنشهای کرنش های حرارتی در نظر گرفته شوند. اثرات کرنش های حرارتی، فقط تا حدی قابل جبران است. اجزای الکترونیکی استفاده شده در مبدل ها و خواص آنها فقط از نظر حرارتی در رنج دمایی محدودی پایدار هستند. بنابراین رنج دمای مجاز برای مبدل گشتاور محدود است و معمولا به بخش های مختلف تقسیم می شود.
برای محدوده دمای اسمی، حدود بالایی برای تاثیر دما بر سیگنال خروجی در مشخصات مبدل ذکر شده است. بین تاثیر دما بر نقطه صفر که باعث تغییر موازی در منحنی مشخصه مبدل می شود (نقطه صفر مبدل جابجا می شود)و تاثیر دما بر حساسیت که باعث تغییر در شیب منحنی مشخصه می شود، باید تمایز قائل شد.
اگر توزیع دما در حال تغییر یا غیر یکنواخت باشد، اثر آن نسبت به وضعیتی که توزیع دمایی استاتیک و یکنواخت وجود دارد، قوی تر است.
منظور از رطوبت، آب به صورت قطرات نیست، بلکه به مقدار بخار آب حل شده در هوای اطراف اشاره دارد. به عنوان یک قاعده، این به عنوان درصد رطوبت نسبی بیان می شود، که در آن رطوبت نسبی 100٪ به اشباع اشاره دارد. وقتی رطوبت محیط به حالت اشباع برسد، بخار آب دیگر نمی تواند در هوا حل شود و شروع به متراکم شدن می کند. در شرایط رطوبت متراکم، اجزای الکترونیکی می توانند با شبنم پوشانده شوند، این موضوع بسیار مهم است، زیرا می تواند باعث ایجاد یک شنت الکتریکی شود. رطوبت همچنین می تواند بر قطعات الکترونیکی و پلاستیک ها تأثیر بگذارد. در دماهای پایین تر از نقطه انجماد، رطوبت متراکم حتی می تواند یخ بزند، و این می تواند منجر به شنت نیروی مکانیکی یا شنت گشتاور شود. هر دو اثر می توانند باعث خواندن مقادیر نادرست اندازه گیری شوند.
شرایط الکترومغناطیسی در محیطی که یک مبدل گشتاور در آن کار می کند، تأثیر مهمی بر نحوه عملکرد مبدل دارد. این عمدتا به دلیل وجود قطعات الکترونیکی است که در دستگاه گنجانده شده است (تبدیل سیگنال های روتور، انتقال سیگنال از روتور به استاتور). علاوه بر این، مانند سایر مبدل ها، مجموعه ای از مشکلات معمول ناشی از تعامل با کابل ها وجود دارد.
منابع معمولی تداخل الکترومغناطیسی در میزهای تست قدرت برای موتورهای وسایل نقلیه موتوری یا گیربکس، ولتاژهای احتراق بالا در موتورهای احتراق داخلی و همچنین اثرات ناشی از ماشینهای الکتریکی بزرگ است. اگر اثرات تداخلی از حد مجاز مبدل گشتاور بیشتر شود، باید اقداماتی برای کاهش آنها در منبع انتشار انجام شود. در غیر این صورت باید از نوعی محافظ یا غربالگری استفاده شود.
مطالب پیشنهادی برای شما
اندازه گیری گشتاور (1)
اندازهگیری دقیق گشتاور، در صنعت، بسیار مهم و حیاتی می باشد، در اینجا با نحوه اندازه گیری گشتاور آشنا می شوید
اندازه گیری گشتاور (2)
در این مقاله شما با ساختار مکانیکی و الکتریکی انواع مبدل های گشتاور چرخان و غیر چرخان آشنا خواهید شد
اندازه گیری گشتاور (3)
این فصل معیارهای اصلی را که هنگام انتخاب مبدل گشتاور و پیکربندی یک برنامه کاربردی نیاز است، خلاصه می کند.
اندازه گیری گشتاور (4)
مبدل های گشتاور با روش های مختلف نصب می شوند. در اینجا با انواع روش های نصب این مبدل ها آشنا خواهید شد