نحوه انتخاب سنسور گشتاور دوار
در این مقاله با انواع سنسورهای گشتاور آشنا خواهید شد و همچنین پارامترهای تاثیرگذار در انتخاب این سنسورها نیز بررسی خواهد شد

نحوه انتخاب سنسور گشتاور دوار
در این مقاله با انواع سنسورهای گشتاور آشنا خواهید شد و همچنین پارامترهای تاثیرگذار در انتخاب این سنسورها نیز بررسی خواهد شد
دو دلیل کلیدی برای صرف زمان جهت انتخاب دقیق سنسور گشتاور وجود دارد: جلوگیری از آسیب و اطمینان از دقت.
جلوگیری از آسیب - سنسور گشتاور یک جزء حیاتی در اندازه گیری دقیق است و با طراحی می تواند شبیه فیوز مکانیکی عمل کند. انتخاب مناسب برای جلوگیری از خرابی های مکانیکی مهم است زیرا سنسور گشتاور یکی از بخشهای ضعیفتر خط محرکه است. دلیل آن این است که برای اندازهگیری دقیق گشتاور، کرنش باید به یک نقطه دقیق هدایت شود و یک کرنش سنج باید روی آن نقطه قرار گیرد - به طور کلی ضعیفترین نقطه ساختار سنسور.
اطمینان از دقت - مهم است که عدم قطعیت داده های گشتاور را محدود کنید. با اطمینان از برآورده شدن تمام نیازهای الکتریکی حسگر گشتاور، می توانید بهترین داده های ممکن را به دست آورید و آن را در برنامه خاص خود قابل استفاده تر کنید.
این برگه فنی با بررسی موارد زیر به شما کمک می کند حسگر گشتاور مناسب را برای نیازهای خود انتخاب کنید:
انواع مختلفی از سنسورهای گشتاور وجود دارد. درک مزایا و معایب هر کدام اولین قدم در انتخاب سنسور مناسب برای کاربرد و نیازهای شماست.
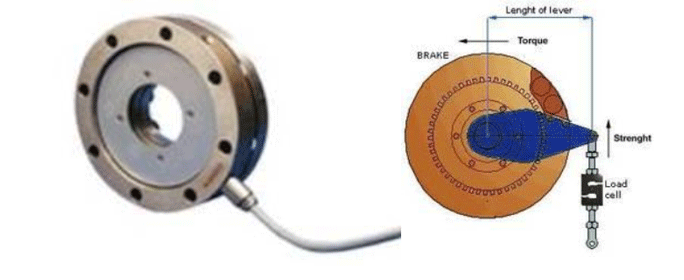
سنسورهای گشتاور واکنش سنسورهای گشتاور غیر چرخشی هستند که شبیه به بازوی اهرمی و لودسل عمل میکنند، بدون اینکه واقعا به هیچکدام نیاز داشته باشند.
مزایا:
معایب:
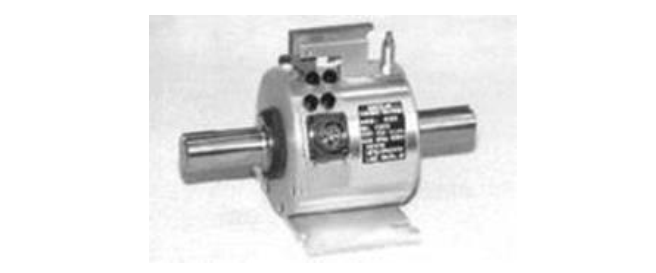
یک سنسور گشتاور به سبک حلقه لغزش حدود 40 سال پیش طراحی شد. از برس های گرافیتی استفاده می کند که بر روی حلقه های لغزنده آلیاژ نقره می غلتند.
مزایا:
معایب:
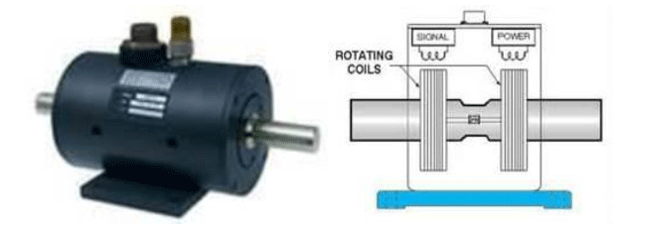
ترانسفورماتورهای چرخشی از نظر مکانیکی شبیه به سنسور حلقه لغزش هستند. اما از نظر الکتریکی، به جای استفاده از حلقه های لغزنده و برس، از ترانسفورماتورهای چرخشی استفاده می کند. یک ترانسفورماتور برای تحریک حسگر گشتاور و ترانسفورماتور دوم برای بازگرداندن داده ها استفاده می شود.
مزایا:
معایب:
روش های اندازه گیری گشتاور (1)
اندازهگیری دقیق گشتاور، بهویژه در ماشین های چرخان، تقاضاهای سنگینی را از طرف تولیدکنندگان و میزهای آزمایش ایجاد میکند، در اینجا شما با نحوه اندازه گیری گشتاور آشنا می شوید
سنسورهای گشتاور به سبک گیره زمانی ایده آل هستند که شکستن شفت و نصب یک سنسور گشتاور خطی امکان پذیر نباشد.

مزایا:
معایب:
در اوایل دهه 1990، سنسور گشتاور تله متری آنالوگ مقرون به صرفه و دقیق شد.

مزایا:
معایب:
در طول پنج تا ده سال گذشته، تله متری دیجیتال به روشی عملی تر برای ساخت حسگرهای گشتاور تبدیل شده است. آنها نسبت به سایر سنسورها از فناوری بالاتری برخوردار هستند و در مقایسه با سایر سنسورهای گشتاور موجود در بازار دارای مزایای بیشتری هستند.

مزایا:
معایب:
ملاحظات کاربردی
برگه اطلاعات سنسور گشتاور منبع مفیدی برای مقایسه سنسورها برای کاربرد خاص شما است. برگه های اطلاعات می توانند نشان دهند که حسگر گشتاور به طور کلی چگونه عمل می کند. با این حال، تمام مقادیر موجود در دیتاشیت در یک محیط آزمایشگاهی ثبت میشوند، بنابراین بیشتر دادهها استاتیک هستند، و دینامیک یا چرخان نیستند. شما باید در نظر بگیرید که حسگرهای گشتاور هنگام پین کردن در برنامه شما چگونه عمل می کنند.
الزامات دقت (غیر خطی).
دقت اندازهگیری یا سطح عدم قطعیت، یکی از نکات کلیدی در هنگام انتخاب سنسور گشتاور است زیرا کاربردهای مختلف به سطوح مختلف عدم قطعیت نیاز دارند. به عنوان مثال:
چگونه عدم قطعیت اندازه گیری یک سنسور گشتاور را تعیین می کنید؟ عدم قطعیت سنسور به طور کلی دارای شش جزء است:
روش های اندازه گیری گشتاور (2)
در این مقاله شما با ساختار مکانیکی و الکتریکی انواع مبدل های گشتاور چرخان و غیر چرخان آشنا خواهید شد
شما می توانید از فرمول عدم قطعیت اندازه گیری (1) برای تخمین عدد عدم قطعیت، با استفاده از داده های برگه اطلاعات سنسور گشتاور استفاده کنید.
یکی از عوامل مهم عدم قطعیت سنسور، داده های کالیبراسیون آن است. بنابراین، مهم است که بدانید فروشنده شما از چه نوع تجهیزات کالیبراسیونی استفاده می کند و این تجهیزات کالیبراسیون چقدر عدم قطعیت دارند. در برخی از کشورها، سازمان های حاکمی وجود دارند که اندازه گیری گشتاور را کنترل می کنند. در آلمان، PTB (مشابه موسسه ملی استاندارد و فناوری) صحت تجهیزات کالیبراسیون آزمایشگاه را تیید می کند و گواهینامه صادر می کند. با انتخاب فروشنده ای با دارنده این نوع گواهی، می توانید به داده های برگه داده کالیبراسیون سنسور گشتاور اطمینان بیشتری داشته باشید.

که در آن:
Udc خروجی سنسور یا حساسیت آن
Udlh: خطی + هیسترسیس
UTK0: اثر دما در نقطه صفر
UTKc: اثر دما در ماکزیمم خروجی
Urel: تکرارپذیری
Upara: بارهای غیر محوری
محدوده ظرفیت
هنگام در نظر گرفتن سنسورهای گشتاور، مهم است که تمام گشتاورها و پیک ها را در نظر بگیرید. این پیک ها و اسپایک ها، اگر خارج از محدوده ایمن استفاده باشند، می توانند به سنسور گشتاور آسیب برسانند. اگر دوره های زمانی این اسپک ها به اندازه کافی کوتاه باشد و زمان پاسخ سنسور گشتاور به اندازه کافی کم باشد، ممکن است حتی تا زمانی که به سنسور آسیب وارد نشده است، آنها را در داده های خود مشاهده نکنید. بنابراین، مهم است که محدوده گشتاور خود را بدانید و سنسور گشتاوری را انتخاب کنید که بتواند این اسپایک ها را در خود جای دهد.
علاوه بر این، شما باید تصمیم بگیرید که آیا میخواهید این جهشهای گشتاور را اندازهگیری کنید یا فقط از آنها در امان بمانید. اگر میخواهید اسپایک ها را اندازهگیری کنید، باید مطمئن شوید که خروجیهای الکتریکی حسگر شما میتواند اسپایک هایی را که میخواهید بخوانید ، اندازهگیری می کند.
با این حال، اگر فقط به اندازه گیری گشتاور کار (متوسط) فکر می کنید، فیلتر الکتریکی یا استفاده از اعضای نرم پیچشی در خط محرکه می تواند اسپایک ها را حذف یا خنثی کند. این به شما امکان می دهد اندازه سنسور گشتاور را به گشتاور کار نزدیکتر کنید.
دانستن نرخ های اضافه بار سنسور گشتاور نیز مهم است. به طور معمول، استاندارد صنعتی برای اضافه بار سنسور ایمن حدود 200 درصد از حداکثر گشتاور نامی است - نقطه ای که سنسور شروع به تسلیم شدن می کند. اضافه بار فاجعه بار معمولا می تواند در حدود 400 درصد از حداکثر گشتاور نامی رخ دهد - نقطه ای که در آن پیچ ها ممکن است خسته شوند یا سنسور ممکن است در اثر ترک خوردن یا خم شدن از کار بیفتد.
اگر میزان اضافه بار سخاوتمندانهتری را ترجیح میدهید، برخی از فروشندگان یک اضافه بار 400 درصد ایمن و 800 درصد اضافه بار فاجعهبار را ارائه میدهند. با این حال، افزایش درجه اضافه بار، سفتی سنسور گشتاور را افزایش می دهد و رزولشن یا نسبت سیگنال به نویز را کاهش می دهد. همچنین معمولا به این معنی است که سنسور از نظر طراحی بزرگتر و سنگین تر است تا نیروهای قوی تری را در خود جای دهد. شما باید تصمیم بگیرید که آیا امتیاز اضافه بار بالاتر را فدای اندازه، وزن و نسبت سیگنال به نویز می کنید یا خیر.
اکثر سنسورهای گشتاور موجود در بازار بین 10000 تا 20000 RPM رتبه بندی می شوند. وزن، بالانس و سرعت بحرانی فاکتورهایی هستند که باید هنگام انتخاب درجه RPM سنسور در نظر گرفته شوند.
وزن - معمولا وقتی در محدوده ظرفیت بالا می روید، سنسور گشتاور باید آهسته تر بچرخد - بیشتر به دلیل وزن و قطر آن. برخی از سنسورهای گشتاور با دورهای بالاتر وجود دارند که تا 30000 دور در دقیقه نرخ بندی می شوند.
بالانس- برخی از حسگرهای گشتاور قبل از ارسال در کارخانه بالانس می شوند. اگر سنسور گشتاور از قبل متعادل باشد، معمولا به درجه تعادل G 2.5 می رسد.
سرعت بحرانی - سرعت بحرانی همان RPM است که در آن خط محرکه می خواهد ناپایدار شود. معمولا سنسور گشتاور اولین چیزی است که در این نوع شرایط از کار می افتد. برای کمک به جلوگیری از سرعت بحرانی، می توانید یک سنسور گشتاور با بلبرینگ و مانت پایه ای انتخاب کنید. این باعث کوتاه شدن شفت می شود زیرا سنسور گشتاور به عنوان یک بلوک یاتاقان عمل می کند.
الزامات خروجی
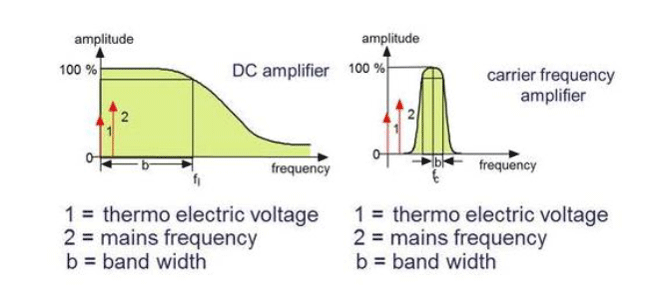
خروجی حسگر گشتاور شما معمولا به نوعی سیستم اندازه گیری ابزار دقیق مانند سیستم های اندازه گیری خروجی استرین گیج ها یا سیستم جمعآوری داده (DAQ) میرود. در سنسورهای گشتاور واکنش - یا سنسورهای گشتاور مدل قدیمی، از نوع حلقه لغزش - خروجی ها معمولا میلی ولت بر ولت است که یک خروجی استرین گیجی است. هنگام استفاده از چنین خروجی، معمولا از یک تقویت کننده اندازه گیری AC یا DC برای تغذیه سنسور استفاده می شود. سپس این تقویت کننده خروجی را به یک سیگنال قابل استفاده، معمولا آنالوگ یا دیجیتال، تنظیم می کند. سیگنالهای دامنه DC مثبت یا منفی ۱۰ ولت اغلب بیشتر از خروجی فرکانسی یا خروجی دیجیتال مستعد نویز هستند.
خروجی های فرکانس نسبت به خروجی های دامنه کمتر مستعد نویز هستند. بنابراین سنسورهای گشتاور مدرن تر نیز خروجی فرکانس ارائه می دهند:
هرچه فرکانس کمتر باشد، تفکیک پذیری بهتر است. به عبارت دیگر، خروجی 10 کیلوهرتز معمولا وضوح بیشتری نسبت به خروجی 240 کیلوهرتز دارد. این به این دلیل است که افزایش فرکانس معمولا نویز بیشتری را در انتهای پایین ایجاد می کند. با این حال، مزیت خروجی فرکانس بالاتر این است که می تواند زمان پاسخ را افزایش دهد و تأخیر انتشار را کاهش دهد - زمانی که طول می کشد تا یک رویداد گشتاور در ورودی اتفاق بیفتد و سپس در خروجی سنسور گشتاور دیده شود.
روش های اندازه گیری گشتاور (3)
این فصل معیارهای اصلی را که باید هنگام انتخاب مبدل گشتاور و پیکربندی یک برنامه کاربردی در نظر داشت، خلاصه می کند.
خوب است توجه داشته باشید که سنسورهای گشتاور دیجیتال می توانند خروجی هایی مانند CAN، ProfiBus، ProfiNet و EtherCAT داشته باشند. به دلیل تبدیل سیگنال کمتر، عملکرد کلی می تواند بهبود یابد. اگر سنسور گشتاور مجهز به خروجی های دیجیتال نیست، معمولا می توانید یک دستگاه جداگانه برای برقراری ارتباط دیجیتال خریداری کنید.
هنگام ارزیابی سنسورهای گشتاور، مهم است که الزامات زمان پاسخ برنامه خود و همچنین نسبت بین نرخ نمونه برداری و زمان پاسخ را در نظر بگیرید تا از پدیده Aliasing اجتناب شود. برخی از سنسورهای گشتاور دارای نسبت 3:1، 6:1 یا حتی 12:1 هستند. زمانهای پاسخ بالا به شما امکان میدهد ارتعاشات پیچشی را اندازهگیری کنید.
شرایط محیطی مانند دما، خاک، روغن، خوردگی و EMI باید بر انتخاب شما در سنسور گشتاور تأثیر بگذارد.
مانند همه سنسورهای مبتنی بر کرنش سنج، حسگرهای گشتاور به دما حساس هستند، بنابراین مهم است که شرایط دمایی محیط کاری سنسور را بدانید.
یک تغییر گرادیان هنگامی که به سمت پایین شفت فلزی می رود، ابتدا روی یک طرف سنسور گشتاور تأثیر می گذارد. به طور موثر، یک طرف سنسور گشتاور می تواند گرم تر از طرف دیگر باشد و احتمالا باعث پیچش سنسور می شود.
سازنده سنسور گشتاور اغلب می تواند اطلاعاتی در مورد نحوه عملکرد سنسور در شرایط تغییرات دما ارائه دهد. معمولا سنسورهای گشتاور در محفظه هایی قرار میگیرند که در آن درجه حرارت های مختلف به سنسور اعمال می شود، تا دادههایی در مورد عملکرد حسگر گشتاور در محیطی با تغییر دما جمعآوری شود. توجه به این نکته مهم است که هر چه سنسور استرین گیج بیشتری در ساخت سنسور گشتاور استفاده شود، آن سنسور در طول تغییرات دما بهتر عمل می کند. همچنین اگر سنسور فولادی به درستی ساخته شوند، اثرات تغییر دما به حداقل می رسد.
ساختار سنسور گشتاور را از نظر محافظت در برابر کثیفی، روغن و خوردگی - به ویژه قطعات حساس تر، در نظر بگیرید. درجه حفاظت سنسورها باهمدیگر متفاوت هستند.
همچنین باید بدانید که دادههای حسگر گشتاور چگونه منتقل میشوند و آیا روش انتقال نسبت به روغنها و کثیفی حساس است یا خیر. برای مثال، در حسگرهای حلقه لغزش، کثیفی و روغن بیشتر بر انتقال سیگنال به دنیای بیرون تأثیر میگذارند. این سنسورها نسبت به سیستم های تله متری دیجیتال بیشتر در برابر روغن و آلودگی حساس هستند.
سنسورهای گشتاور اساسا آنتن هستند - آنها دارای سیم پیچ در داخل خود هستند، بنابراین کابل کشی مناسب، شیلد بندی و اتصال به زمین آنها بسیار مهم است.
سنسورهای گشتاور مدرن به گونهای طراحی شدهاند که از نظر پیچشی، سفت و با زمانهای پاسخ فرکانس بالاتر باشند. این به کاربر نهایی توانایی بیشتری برای اندازه گیری گشتاور دینامیکی می دهد
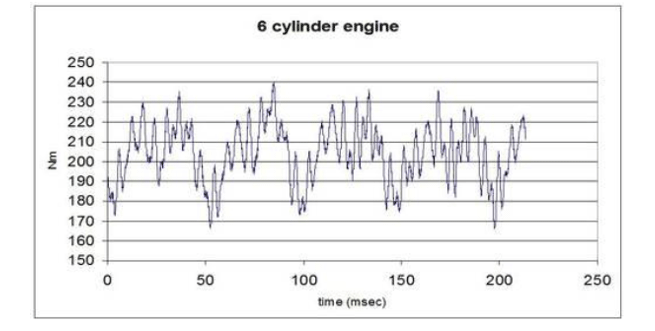
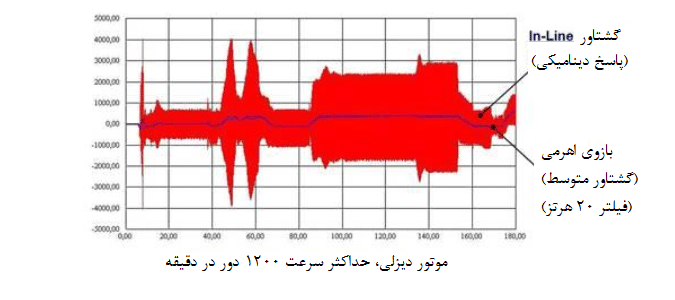
تصویر زیر گشتاور موتور دیزلی را نشان می دهد که روی یک دینامومتر اندازه گیری شده است که دارای حسگر گشتاور درون خطی و همچنین بازوی اهرمی و لودسل است. اگر فرکانس گشتاور نوسانی بیشتر از فرکانس طبیعی دینامومتر باشد، پیکربندی بازوی اهرمی می تواند به عنوان یک فیلتر مکانیکی پایین گذر، معمولا حدود 20 هرتز عمل کند.
در اینجا، لودسل بازوی اهرمی (به رنگ آبی) سیگنال گشتاور متوسط فیلتر شده را می دهد. در حالی که سنسور گشتاور درون خطی (قرمز) سیگنال گشتاور دینامیکی تری به شما می دهد - این مزیت سنسور های گشتاور چرخان است.
روش های اندازه گیری گشتاور (4)
مبدل های گشتاور را می توان در هر جهت مناسب با توجه به جهت گرانش نصب کرد. در این مقاله شما با انواع روش های نصب مبدل های گشتاور آشنا خواهید شد
هنگامی که یک شفت شروع به چرخیدن می کند، تعدادی از اثرات می تواند رخ دهد که بر حسگر گشتاور و توانایی آن در خواندن صحیح گشتاور تأثیر می گذارد. ملاحظات دینامیکی باید شامل اثرات چرخشی، سرعت های بحرانی و بارهای اضافی باشد.
اثرات چرخشی می تواند بر خروجی سنسورهای گشتاور تأثیر بگذارد. یک نوع اثر چرخشی مزاحمت باد هوا می باشد. متأسفانه اثرات چرخشی در اکثر دیتاشیت ها فهرست نشده است. این به این دلیل است که اثرات چرخشی بسته به RPM متفاوت است و می تواند از برنامه ای به برنامه دیگر تغییر کند و تعیین کمیت را دشوار می کند. با این حال، برخی از شرکت ها اثرات چرخشی را جبران می کنند.
برای کمک به حذف سرعت های بحرانی یک شفت دوار، یک حسگر گشتاور ایده آل، باید سفتی بی نهایت داشته باشد، کاملا بی وزن باشد و طول نداشته باشد. در حالی که این امر غیرممکن است، تولید کننده باید سعی کند یک حسگر گشتاور را تا حد ممکن سفت، تا حد امکان سبک و تا حد امکان کوتاه بسازد.
در یک RPM خاص، شفت می خواهد ناپایدار شود و در مواقع بحرانی، شفت به عنوان یک موج سینوسی یا ارتعاش عمل می کند. هنگامی که شفت ناپایدار می شود، حسگر گشتاور مستعد خرابی مکانیکی مانند ترک خوردن به دو قطعه است. بنابراین، همیشه خوب است که قبل از استفاده، تست آنالیز پیچشی محور چرخان خود را انجام دهید.
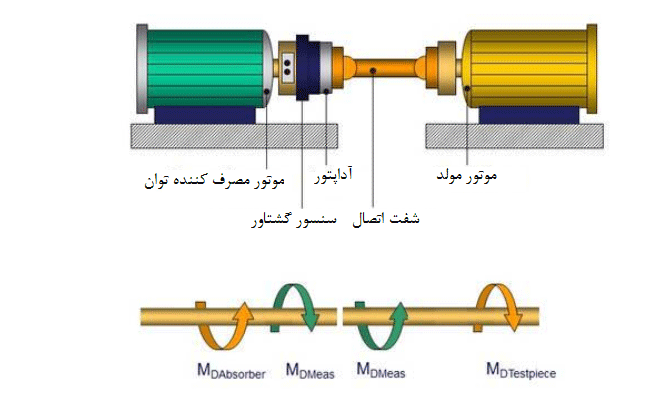
این ایده خوبی است که وزن بیشتر حسگرهای گشتاور را تا حد امکان به یک بلوک یاتاقان در پایه تست نزدیک نگه دارید. در تصویر زیر، سنسور گشتاور و کوپلینگ نزدیک به دینامومتر - در این مورد، یک موتور الکتریکی - در سمت چپ قرار دارند. با نگه داشتن بیشتر وزن نزدیک به یک بلوک یاتاقان، می توانید سرعت بحرانی خود را خارج از محدوده اندازه گیری ببرید و به جلوگیری از یک وضعیت فاجعه آمیز کمک کنید.
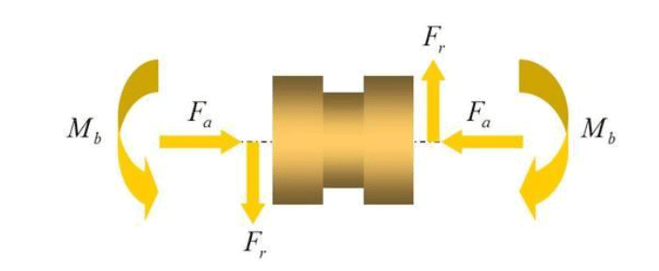
بارهای انگلی نیروهای محوری، نیروهای جانبی و نیروهای لنگر خمشی هستند که هنگام چرخش شفت رخ می دهند. این نیروهای خارج از محور می توانند خطای بسیار بزرگی را مانند تغییرات دما به سنسور گشتاور چرخشی اضافه کنند. حذف این نیروها به شما کمک می کند تا دقت تست خود را افزایش دهید یا عدم قطعیت را کاهش دهید.
تامین کننده سنسور گشتاور می تواند به شما در درک این نیروهای انگلی، نحوه تاثیر آنها بر حسگر گشتاور و میزان خطای اعمالی این نیروها به سنسور گشتاور کمک کند. اکثر تولیدکنندگان محدودیتهایی را برای نیروهای انگلی در برگههای اطلاعات خود قائل هستند. حداکثر این محدودیت ها می تواند بر خروجی سنسور گشتاور تأثیر بگذارد. به طور معمول، اگر به 100 درصد از محدودیت های ترکیبی نیروی انگلی برسید، می توانید انتظار خطای 0.3 درصدی Full Scale را در سنسور گشتاور خود داشته باشید. بنابراین، به حداقل رساندن بار انگلی در برنامه مهم است.
هنگام انتخاب سنسور گشتاور، در درجه اول باید محدودیت های فیزیکی کاربرد خود را بدانید، تا بتوانید طول و وزن سنسور را در نظر بگیرید. سنسورهای گشتاور فلنج به فلنج اغلب کوتاهتر، سبکتر و سفتتر هستند. سنسورهای گشتاور شفت دایرهای معمولا طولانیتر و سنگینتر هستند و عملا همیشه سفتتر هستند
سنسورهای فلنج به فلنج معمولا قطر بیشتری دارند. شفتهای دایرهای معمولا قطر کوچکتری دارند. بنابراین، یک سنسور گشتاور دایرهای میتواند به یک بلوک یاتاقان تبدیل شود و سرعت بحرانی پیشرانه را تغییر دهد
پیکربندی نصب سنسور گشتاور تعیین می کند که از چه نوع کوپلینگ هایی باید استفاده کنید. سنسورهای گشتاور فلنج به فلنج معمولا حسگرهای گشتاور شناور هستند. آنها روی پا نصب نمی شوند و معمولً به یک کوپلینگ نوع دوبل فلکس نیاز دارند. سنسورهای گشتاور محور دایرهای بدون پایه نیز به یک کوپلینگ دوگانه خمشی نیاز دارند.
هزینه سنسور گشتاور با موارد زیر افزایش می یابد:
در حالی که هزینه تقریبا همیشه عاملی در خریدهای تجاری است، پس از برآورده شدن سایر نیازهای شما، هزینه باید در آخرین مرحله مورد توجه قرار گیرد. ارزش گذاری هزینه نسبت به سایر نیازها ممکن است منجر به آزمایش نادرست یا آسیب دیدن سنسور شود.
مطالب پیشنهادی برای شما
اندازه گیری گشتاور (1)
اندازهگیری دقیق گشتاور، در صنعت، بسیار مهم و حیاتی می باشد، در اینجا با نحوه اندازه گیری گشتاور آشنا می شوید
اندازه گیری گشتاور (2)
در این مقاله شما با ساختار مکانیکی و الکتریکی انواع مبدل های گشتاور چرخان و غیر چرخان آشنا خواهید شد
اندازه گیری گشتاور (3)
این فصل معیارهای اصلی را که هنگام انتخاب مبدل گشتاور و پیکربندی یک برنامه کاربردی نیاز است، خلاصه می کند.
اندازه گیری گشتاور (4)
مبدل های گشتاور با روش های مختلف نصب می شوند. در اینجا با انواع روش های نصب این مبدل ها آشنا خواهید شد